堆垛機技術要求通用部分:a)設備設計符合人機原理,操作方便安全,可相對大限度減少工藝動作,降低勞動強度并不會對操作人員的個人身體條件提出高于平常的要求。b)充分考慮設備的運行可靠性和無維修設計,設備運行穩定,故障率低,易于維修維護。c)設備安裝、調整、換模、移位方便可靠。因發生以上工作時,設備不得出現因結構不合理引起的變形或破壞。d)設備設計制造充分考慮了產品質量的穩定性和品種適應性,有開放性結構方便后來的品種、型號變換和設備技術的升級換代。e)設備整體設計和安裝質量符合國家有關規范,設備外型美觀,結構工藝性合理并按規范工藝安裝到位。堆垛機能夠高效地利用倉庫空間,特別是在高層貨架的存儲中。安徽懸掛型巷道堆垛機

堆垛機結構主要有:水平行走結構、提升機構、取放貨機構、電氣柜和蓄電池等部分組成。堆垛機本體具有足夠的剛度和強度,整個結構部分布局緊湊、強度高、剛性好。取放貨機構左右兩塊定板通過載物臺連接并安裝在橫梁上,左右方向的定板、中板和外板通過伸縮導軌依次連接在一起。安裝在定板上的傳動組件帶動中板進行前后方向滑動,同時外板通過傳動鏈1及傳動鏈與中板進行同步隨動。撥叉組由安裝在左右外板上的四個撥叉組成,即前撥叉組和后撥叉組,前后撥叉組依據取放機構在不同的工作狀態時,自動切換相應的位置(水平或垂直狀態)。限位開關用于限制外板前后伸縮時的極限距離。青海巷道堆垛機由堆垛機的購買成本較高,特別是對于高性能、大容量的堆垛機而言。

機架它是堆垛機的主體框架,為其他部件提供支撐。通常采用金屬結構,如鋼材焊接而成,要具備足夠的強度和剛性,以保證堆垛機在高速運行和承載重物時的穩定性。載貨臺是放置貨物的平臺。它可以根據貨物的形狀、尺寸和承載要求進行設計。載貨臺一般配備有貨物固定裝置,如托盤定位裝置、夾緊裝置等,防止貨物在堆垛機運行過程中發生位移或掉落。伸縮貨叉是堆垛機存取貨物的關鍵部件。它可以在水平方向伸縮,能夠將貨物準確地放置到貨架的指定位置或者從貨架位置取出貨物。貨叉的伸縮動作通常由電機或液壓系統驅動,并且其伸縮長度可以根據貨架的列間距進行調整。
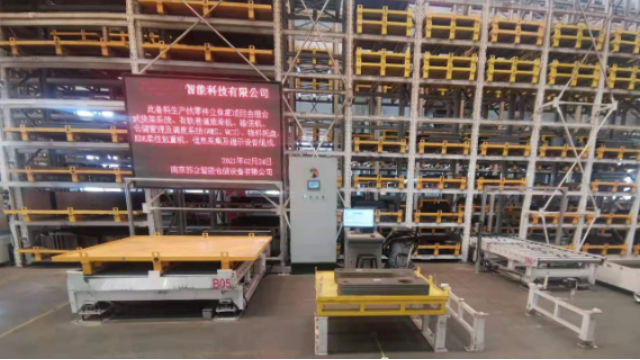
換電移動平臺用于堆垛機蓄電池充電,同時也是換電時的蓄電池過渡銜接平臺,在現代物流倉儲的高效運轉中扮演著關鍵角色,主要由電池承載框架、輥子、電池鎖緊裝置及鈑金外殼等組成。電池承載架由碳鋼型材焊接而成,這種材質具備良好的強度與穩定性,能夠承受蓄電池的重量以及在轉運過程中可能產生的沖擊力。電池承載架上安裝輥子作為電池的轉運平臺,輥子尺寸依據蓄電池尺寸及重量選型,確保在轉運過程中電池能夠平穩移動,同時輥子的離地高度與蓄電池放置在堆垛機上的離地高度相匹配,這一細節設計極大地方便了電池的更換操作,減少了因高度差可能帶來的碰撞風險以及人力物力的消耗。電池鎖緊裝置安裝在電池承載架上,用于鎖緊電池,防止在充電或轉運過程中電池發生位移,確保整個操作過程的安全性。整體結構加工方便且牢固可靠,不僅在制造環節能夠節省時間和成本,而且在長期使用中能夠穩定運行,可滿足電池充電及暫存時的承載等要求,為堆垛機的持續作業提供了有力保障,有效提升了物流倉儲的作業效率和自動化水平。堆垛機需要專業的技術人員進行維修和保養,這增加了企業的運營成本和時間成本。
堆垛機的升降驅動裝置工作原理精確控制:升降驅動裝置的位置控制是非常關鍵的。在堆垛機的立柱上通常安裝有位置傳感器,如旋轉編碼器或激光測距傳感器等。這些傳感器可以實時監測載貨臺的高度位置,并將信號反饋給電氣控制系統。電氣控制系統根據傳感器反饋的信息,結合預先設定的目標位置,精確地控制電機的運轉,從而實現載貨臺的準確升降。例如,當要將貨物存放到高層貨架的某一位置時,控制系統會根據位置傳感器的反饋,使載貨臺準確地停在目標貨位的高度,誤差可以控制在幾毫米甚至更小的范圍內。堆垛機的“大腦”,內置PLC、變頻器、電源供應器、電磁開關等中心部件。青海巷道堆垛機由
堆垛機能夠在寬度較小的巷道內運行且適合進行高層貨架作業,提高了倉庫的利用率,節省了經濟成本。安徽懸掛型巷道堆垛機
轉軌堆垛機的工作原理直軌段工作:在巷道直軌段運行時,堆垛機的走行電機驅動走行輪,使堆垛機沿天地軌方向運動,升降臺在提升電機的驅動下帶動載貨臺升降,貨叉電機驅動貨叉完成貨物的存取操作,與一般直軌堆垛機的工作方式相同。轉軌工作:以四巷道為例,當堆垛機需要從a1軌道切換到a2軌道運行時,相應的轉軌裝置會根據系統指令將ab段彎軌道接上a2軌道和b轉軌直段,堆垛機即可運行到a2巷道進行出入庫作業;當堆垛機需要從a1軌道切換到a3軌道運行時,a2巷道對應的轉軌裝置先將ab段彎軌道與b轉軌段斷開,a3巷道對應的轉軌裝置再將ab段彎軌道接上a3軌道和b轉軌直段,堆垛機便能順利通過a2巷道的轉軌裝置運行到a3巷道進行出入庫作業,從而實現堆垛機在任意巷道之間的切換。安徽懸掛型巷道堆垛機