-
 天津客車多路視頻拼接系統方案商
天津客車多路視頻拼接系統方案商(下篇)主動安全預警系統的多路視頻拼接實現的技術原理,主要涉及到視頻拼接技術和圖像處理算法。以下是對這一技術原理的詳細闡述: 三、應用場景與優勢主動安全預警系統的多路視頻拼接技術主要應用于需要大范圍視野的監控場景,如交通監控、生產線監控等。通過這一技...
2025-06-12 -
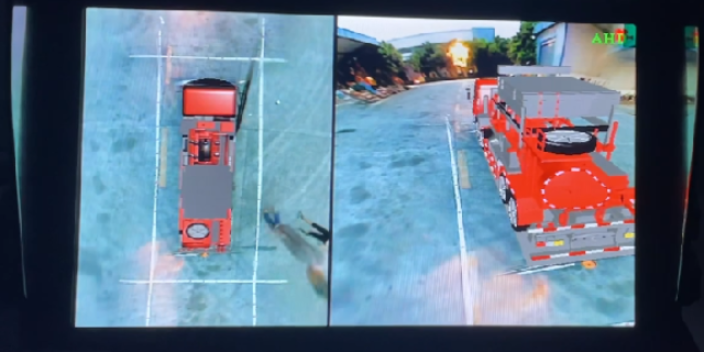
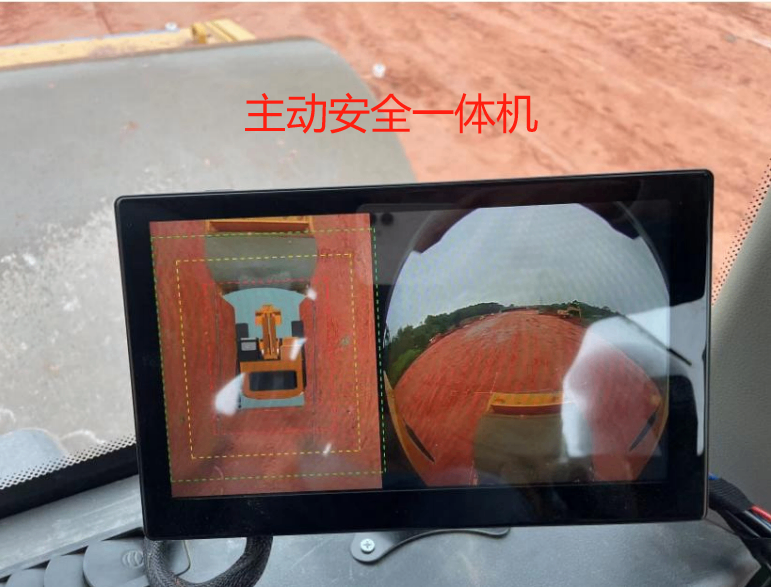 車輛主動安全一體機系統|車輛主動安全防控系統|360全景智防安全觸控一體機系統
車輛主動安全一體機系統|車輛主動安全防控系統|360全景智防安全觸控一體機系統車輛主動安全一體機系統:全方W守護,智能護航 車輛主動安全一體機系統,作為現代汽車安全技術的集大成者,巧妙融合了360°全景環視影像系統(AVM)與BSD盲點檢測系統的強大功能,通過一塊觸控高清一體屏,為駕駛員提供了前所未有的駕駛視野與安全...
2025-06-12 -
 山西商用車多路視頻拼接系統技術解決方案
山西商用車多路視頻拼接系統技術解決方案(上篇)AI360全景影像集成4G網口輸出并帶有BSD(Blind Spot Detection)預警功能的應用原理,主要基于視頻拼接技術、4G通信技術、系統集成與兼容性技術,以及先進的圖像處理和智能識別算法。以下是其詳細的應用原理: 一、視頻拼接技...
2025-06-12 -
 貴州AI司機行為檢測預警系統
貴州AI司機行為檢測預警系統(中篇)自帶算法的疲勞駕駛預警系統是一種智能化的安全設備,它能夠通過分析駕駛員的生理特征、駕駛行為及車輛行駛狀態等信息,實時監測駕駛員的疲勞狀態,并在必要時發出預警信號。以下是對該系統的報警狀態及報警參數的詳細闡述: 這是為了確保在正常的駕駛速度下,...
2025-06-12 -
 公交車360環視攝像頭安裝
公交車360環視攝像頭安裝4G 360全景影像融合超聲波雷達的系統集成應用場景,這些場景主要圍繞提升安全性、監控效率和智能化管理等方面展開。 1. 公共交通領域公交車: 實時監控車輛周圍情況,特別是在復雜路況和人流密集區域,結合4G網絡實現遠程監控和調度管理,提升公交運...
2025-06-12 -
 龍門架8路360全景影像系統
龍門架8路360全景影像系統車側盲區影像與360全景的區別:車側盲區影像只顯示車身側面的影像,360度全景影像會顯示車身四周的影像。配備360度全景影像的汽車在車身四周有很多攝像頭,這樣可以將車身四周的影像顯示在中控屏幕上。配備車側盲區影像的汽車只在左右兩個后視鏡上有攝像頭。360度全景...
2025-06-12 -
龍門架360度全景攝像頭
全景圖像的優點:清理死角,普通汽車有A/B/C柱子盲區、前/后盲區和后視鏡盲區。這些盲點可能是看不到障礙物而被撓的原因。360度全景影像消除了看不見盲點的可能性,確保了行駛和倒車時的安全。記錄情況,部分全景照相機還具有記錄保存功能,可以在停車和行駛時保存周圍的...
2025-06-11 -
 廣西工程車司機行為檢測預警系統
廣西工程車司機行為檢測預警系統(上篇)疲勞駕駛預警集成MDVR系統實現內置4G模塊,支持WIFI無線下載功能的技術原理及應用 1.技術原理 1.1內置4G模塊4G通信:MDVR內置4G模塊,通過LTE網絡實現高速數據傳輸,支持視頻、音頻和數據的實時傳輸。網絡連接:4G模塊通...
2025-06-11 -
 甘肅起重機多路視頻拼接系統聯系方式
甘肅起重機多路視頻拼接系統聯系方式(上篇)4G 360全景環視系統集成毫米波雷達及疲勞駕駛預警在礦場的應用,為礦場作業帶來了革MING性的安全提升。以下是對這一集成系統在礦場應用的具體分析: 一、4G 360全景環視系統4G 360全景環視系統通過在礦車前后左右安裝高清廣角攝像頭,采...
2025-06-11 -
 杭州360環影系統
杭州360環影系統(上篇)AI360全景影像系統通過一系列高科技手段,實現了對工程車全盲區、半盲區的無死角環視,以下是具體處理方法: 一、系統構成AI360全景影像系統通常由以下關鍵部分組成:高清攝像頭:在工程車的前后左右等關鍵位置安裝超廣角、高清夜視攝像頭,用于實時...
2025-06-11 -
 北京360全景環視系統安裝
北京360全景環視系統安裝(下篇)4G8路網口AI360全景影像系統集成了BSD(BlindSpotDetection,盲點監測)功能及疲勞駕駛預警系統,這一組合在多個領域,尤其是交通和工程領域,具有廣泛的應用前景。以下是對該系統的詳細介紹: 通過攝像頭捕捉駕駛員的面部特征、...
2025-06-11 -
 北京升降機360全景影像設備
北京升降機360全景影像設備(上篇)AI視覺拼接集成雷達預警系統在裝載車上的應用,主要體現了現代科技對工業運輸安全性的明顯提升。以下是關于該系統在裝載車上應用的詳細介紹: 一、系統概述AI視覺拼接集成雷達預警系統是一種集成了高清攝像頭、雷達傳感器以及AI學習算法的綜合安全預警系...
2025-06-10 -
 壓裂車360全景影像系統銷售
壓裂車360全景影像系統銷售安裝360全景影像注意的事項有哪些?選擇大型的汽車美容裝飾城安裝360全景影像,因為它們雖然收費相對來說高一些,但是線路連接的地方大多都是焊接,也會大幅的減少,由于虛連造成的問題,而減少故障率或者是車輛自燃現象的發生!車輛后期加裝360全景攝像肯定是為了更好的...
2025-06-10 -
司機行為檢測預警系統方案商
(上篇)疲勞駕駛預警設備在商用車上的推薦安裝位置需要滿足能夠時時刻刻監測到駕駛員面部的條件,以確保設備能夠有效地捕捉到駕駛員的疲勞狀態。以下是一些推薦的安裝位置: 中控臺或儀表盤:這些位置通常位于駕駛員的正前方,且不會被方向盤或其他駕駛操作部件遮擋,...
2025-06-10 -
 杭州鏟車360鳥瞰全景影像
杭州鏟車360鳥瞰全景影像(上篇)自帶BSD(BlindSpotDetection,盲點監測)功能的AI360全景影像系統在廠房叉車作業中的應用,為叉車駕駛提供了更為全MIAN和智能的安全保障。以下是對該系統在廠房叉車作業中應用的詳細分析: 一、系統概述自帶BSD功能的AI3...
2025-06-10 -
 AI360全景影像系統|車載AI視覺360全景影像系統|AI360環視全景影像系統
AI360全景影像系統|車載AI視覺360全景影像系統|AI360環視全景影像系統在車侶AI360全景影像系統定制方案中,全志T507與瑞芯微RK3588芯片在AI360全景影像拼接應用中存在明顯差異,以下從性能、AI算力、圖像處理能力、開發支持及實際應用場景五個維度進行對比分析: 一、性能差異全志T507采用四核ARM Cort...
2025-06-10 -
 商用車360全景影像采購
商用車360全景影像采購車侶360全景影像系統與BSD(BlindSpotDetection)盲區預警系統融合使用可以帶來以下幾個方面的使用價值:1提高盲區監測能力:360全景影像系統可以提供的視覺信息,但在某些情況下,仍然可能存在無法覆蓋的盲區區域,例如車身后方。而BS...
2025-06-10 -
 山東客車多路視頻拼接系統生產廠家
山東客車多路視頻拼接系統生產廠家(下篇)AI360全景影像集成熱成像及疲勞駕駛預警,并實現多路視頻同顯的技術原理,主要涉及多個方面的技術集成與創新。以下是對該技術原理的詳細闡述: 系統可能認為駕駛員處于疲勞狀態。生理特征監測:通過監測駕駛員的心率、呼吸頻率等生理特征來判斷其是否疲勞...
2025-06-10 -
 黑龍江工礦車司機行為檢測預警系統
黑龍江工礦車司機行為檢測預警系統(上篇)自帶算法的疲勞駕駛預警系統是一種先進的汽車安全系統,它通過算法監測駕駛員的疲勞狀態,并在必要時發出警報。關于該系統的駕駛員ID身份識別及存儲功能,以下是對其的詳細解析: 一、駕駛員ID身份識別疲勞駕駛預警系統通常利用機器視覺、人工智能以及傳感...
2025-06-10 -
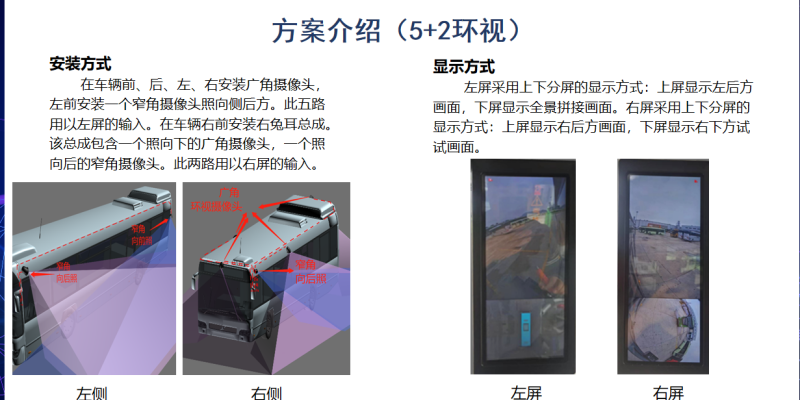
 北京卡車多路視頻拼接系統聯系方式
北京卡車多路視頻拼接系統聯系方式(上篇)主動安全預警系統在解決超長掛車的視覺盲區問題時,可以采取多種技術手段和策略,以下是一些具體的解決方案: 一、攝像頭與360°全景影像系統安裝多個高清攝像頭:在掛車的車頭、車尾以及兩側后視鏡下方等關鍵位置安裝高清攝像頭。攝像頭應具有高清晰度、低...
2025-06-10 -
 深圳360全景影像設備廠家
深圳360全景影像設備廠家360全景影像是什么?360全景影像是汽車安全配置。周圍的相機同時收集車輛周圍的圖像,將圖像傳輸到圖像處理設備,經過一系列圖像處理后,較終形成車輛周圍的全景平面圖,顯示在屏幕上,可視化車輛的位置和周圍的情況。60度全車形象構成,一般來說,全景視頻在前面、停車位...
2025-06-10 -
 北京掛車多路視頻拼接系統技術解決方案
北京掛車多路視頻拼接系統技術解決方案(下篇)AI360全景影像集成疲勞駕駛預警及熱成像系統實現多路視頻同顯的技術原理,主要基于先進的圖像處理、人工智能算法以及多路視頻傳輸與顯示技術。以下是對該技術原理的詳細解析: 四、多路視頻同顯技術視頻流管理:系統需要對來自多個攝像頭的視頻流進行高效...
2025-06-10 -
 青海叉車多路視頻拼接系統開發商
青海叉車多路視頻拼接系統開發商(中篇)關于AI360全景影像系統6路拼接2路監控視頻實時上傳智慧云平臺管理的介紹,可以從以下幾個方面進行闡述: 三、系統功能360度全景監控:系統通過6路攝像頭捕捉車輛或設備周圍的影像,并實時拼接成全景畫面。操作者可以通過觸控屏幕輕松選擇不同的視角...
2025-06-09 -
 安徽4G通信多路視頻拼接系統技術解決方案
安徽4G通信多路視頻拼接系統技術解決方案(下篇)4G網口輸出8路AI360全景影像系統實現多路視頻同顯的技術原理,主要基于視頻拼接技術、4G通信技術、系統集成與兼容性技術,以及先進的圖像處理與傳輸技術。以下是對該技術原理的詳細闡述: 四、多路視頻同顯技術視頻流管理:系統對來自8個攝像頭的視...
2025-06-09 -
 汽車360全景環視系統采購
汽車360全景環視系統采購車侶360全景系統在主動安全預警系統中發揮以下作用:實時監測周圍環境:360全景系統提供全可視的視覺覆蓋,能夠實時監測車輛周圍的環境。通過全景攝像,可以捕捉到車輛前方、側方、后方以及上方的交通情況和障礙物,提供更四周的環境感知能力。.預警潛在危險:通過對全景圖...
2025-06-09 -
 正面吊360盲區偵測系統品牌
正面吊360盲區偵測系統品牌360度全景影像是汽車行業較先進的產品,他依靠一個主機,加四個攝像頭,就可以組成一個單獨的全景系統。然后主機將四個攝像頭所拍攝的。影像經過程序的告訴運行與處理,從而達到無縫拼接的效果!現在市面上的全景大都是依靠這種方式在處理,主要區別在于壓縮以及畫面情緒度上。...
2025-06-09 -
 寧夏客車多路視頻拼接系統開發商
寧夏客車多路視頻拼接系統開發商(篇三)AI360全景影像集成4G網口輸出和BSD盲區預警系統實現8路視頻實時同顯的技術原理,主要涉及視頻拼接技術、4G通信技術、BSD盲區監測技術,以及系統集成與兼容性技術。以下是對這些技術原理的詳細解析: 四、系統集成與兼容性技術硬件集成:AI3...
2025-06-09 -
 商用車360全景環視設備安裝
商用車360全景環視設備安裝360全景影像有什么作用?駕駛員行車安全問題讓人特別關注的,特別是在倒車、泊車,如果車輛后方的影像看不到,更加是讓你驚心動魄。不過很早之前就有倒車雷達系統,通過聲音提醒駕駛員,現在科技越來越先進,也讓科技越來越生活。目前不但能聽還能看了,而且是可以實現360度...
2025-06-09 -
 甘肅物流車多路視頻拼接系統生產廠家
甘肅物流車多路視頻拼接系統生產廠家(中篇)AI360全景影像集成4G網口輸出并帶有BSD(Blind Spot Detection)預警功能的應用原理,主要基于視頻拼接技術、4G通信技術、系統集成與兼容性技術,以及先進的圖像處理和智能識別算法。以下是其詳細的應用原理: 三、系統集成與...
2025-06-09 -
 黑龍江叉車多路視頻拼接系統開發商
黑龍江叉車多路視頻拼接系統開發商(上篇)4G 360全景環視系統集成毫米波雷達及疲勞駕駛預警在礦場的應用,為礦場作業帶來了革MING性的安全提升。以下是對這一集成系統在礦場應用的具體分析: 一、4G 360全景環視系統4G 360全景環視系統通過在礦車前后左右安裝高清廣角攝像頭,采...
2025-06-09