-
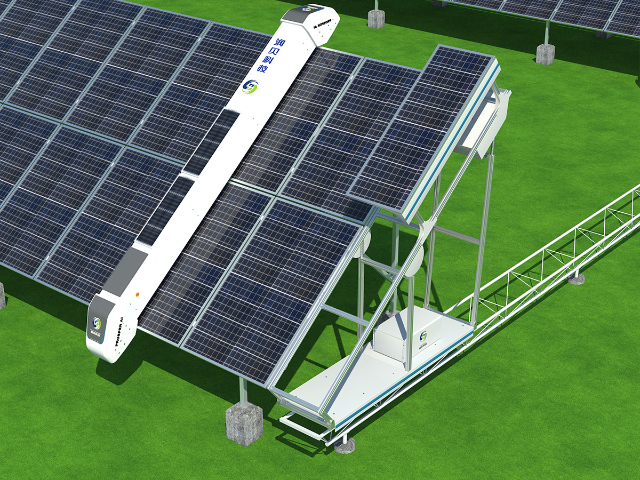
 多功能光伏清潔機器人
多功能光伏清潔機器人遠程監控與控制:光伏清潔機器人支持遠程監控與操作功能。通過內置的 4G/5G 通信模塊,它能夠與云平臺進行實時數據交互。工作人員通過手機或電腦等終端設備,登錄專門的監控軟件,即可實時查看機器人的運行狀態,包括電量、清潔進度、設備溫度等關鍵信息,還能遠程下達指令...
2025-01-25 -
 新疆新型光伏清潔機器人代理商
新疆新型光伏清潔機器人代理商維護不及時:若對光伏清潔機器人缺乏定期維護,其內部機械部件的磨損會加劇。機械部件如齒輪、鏈條、軸承等在長期運行中會因摩擦而逐漸磨損,若不及時更換或添加潤滑油,磨損速度會加快,導致機械故障頻發。電子元件也會加速老化,例如電容的容量會逐漸減小,電阻的阻值會發生變化...
2025-01-25 -
上海定制光伏清潔機器人市場價格
遠程監控與控制:光伏清潔機器人支持遠程監控與操作功能。通過內置的 4G/5G 通信模塊,它能夠與云平臺進行實時數據交互。工作人員通過手機或電腦等終端設備,登錄專門的監控軟件,即可實時查看機器人的運行狀態,包括電量、清潔進度、設備溫度等關鍵信息,還能遠程下達指令...
2025-01-24 -
 廣東工業光伏清潔機器人廠家現貨
廣東工業光伏清潔機器人廠家現貨產品優化期(性能提升):隨著市場需求的增加,光伏清潔機器人制造商開始不斷優化產品性能。在硬件方面,進一步改進機器人的結構設計,使其更加堅固耐用,能夠適應不同的戶外環境,如高溫、沙塵、大風等惡劣條件。同時,提高清潔部件的質量和壽命,降低維護頻率。在軟件方面,不...
2025-01-23 -
 浙江國內光伏清潔機器人銷售公司
浙江國內光伏清潔機器人銷售公司精細定位技術:該機器人搭載先進的激光定位系統,該系統通過發射和接收激光束來感知周圍環境。憑借其高精度的識別能力,誤差可控制在毫米級,能夠精細鎖定光伏板的位置與邊界。在清潔過程中,無論是大面積的光伏陣列還是形狀不規則的分布式光伏板,它都能夠實現高達 99% 以上...
2025-01-23 -
河南節能光伏清潔機器人批發廠家
精細定位技術:該機器人搭載先進的激光定位系統,該系統通過發射和接收激光束來感知周圍環境。憑借其高精度的識別能力,誤差可控制在毫米級,能夠精細鎖定光伏板的位置與邊界。在清潔過程中,無論是大面積的光伏陣列還是形狀不規則的分布式光伏板,它都能夠實現高達 99% 以上...
2025-01-22 -
 重慶集成光伏清潔機器人供應商
重慶集成光伏清潔機器人供應商軟件系統故障:清潔機器人的軟件系統如同其 “大腦”,一旦出現故障,其運行狀態將受到嚴重影響。導航系統是機器人準確抵達目標光伏板的關鍵,若導航系統出錯,例如衛星定位信號受到干擾或者地圖數據不準確,會使機器人無法準確計算出到達指定光伏板位置的路徑,導致其在電站內盲...
2025-01-22 -
 上海直銷光伏清潔機器人什么價格
上海直銷光伏清潔機器人什么價格競爭清潔資源:在一些區域,可能存在多個光伏電站共用清潔資源的情況。例如,在一個集中式光伏產業園區內,有多個不同業主的光伏電站,而清潔服務可能由同一家公司提供。若光伏清潔機器人的調配不合理,某個電站的清潔時間被壓縮,清潔工作不充分。例如,在用電高峰期,為了保障部...
2025-01-21 -
重慶新能源光伏清潔機器人
光伏機器人的應用場景: 水面漂浮光伏電站:水面漂浮光伏電站一般建設在湖泊、水庫等水域之上。具備防水功能的光伏清潔機器人可在水面平穩行駛,對光伏板表面的灰塵和水藻進行清理,有效避免因臟污問題導致發電效率降低,同時在清潔過程中切實保護水體環境不受污染。 ...
2025-01-20 -
 江西銷售光伏清潔機器人廠家現貨
江西銷售光伏清潔機器人廠家現貨軟件系統故障:清潔機器人的軟件系統如同其 “大腦”,一旦出現故障,其運行狀態將受到嚴重影響。導航系統是機器人準確抵達目標光伏板的關鍵,若導航系統出錯,例如衛星定位信號受到干擾或者地圖數據不準確,會使機器人無法準確計算出到達指定光伏板位置的路徑,導致其在電站內盲...
2025-01-20 -
福建直銷光伏清潔機器人批發商
遠程監控與控制:光伏清潔機器人支持遠程監控與操作功能。通過內置的 4G/5G 通信模塊,它能夠與云平臺進行實時數據交互。工作人員通過手機或電腦等終端設備,登錄專門的監控軟件,即可實時查看機器人的運行狀態,包括電量、清潔進度、設備溫度等關鍵信息,還能遠程下達指令...
2025-01-19 -
 重慶工業光伏清潔機器人生產廠家
重慶工業光伏清潔機器人生產廠家模塊化設計理念:采用模塊化設計,光伏清潔機器人的各個部件都具有易于拆卸和更換的特點。它將機器人分為清潔模塊、驅動模塊、控制模塊、電源模塊等多個獨有的模塊,每個模塊都有明確的功能和接口。當某個部件出現故障時,工作人員只需使用簡單的工具,即可快速將故障模塊拆卸下來...
2025-01-19 -
 福建自動化光伏清潔機器人哪家強
福建自動化光伏清潔機器人哪家強模塊化設計理念:采用模塊化設計,光伏清潔機器人的各個部件都具有易于拆卸和更換的特點。它將機器人分為清潔模塊、驅動模塊、控制模塊、電源模塊等多個獨有的模塊,每個模塊都有明確的功能和接口。當某個部件出現故障時,工作人員只需使用簡單的工具,即可快速將故障模塊拆卸下來...
2025-01-18 -
河北新能源光伏清潔機器人代理價錢
標準化推進期(行業規范形成):隨著光伏清潔機器人市場的不斷擴大,標準化問題日益受到重視。為了確保產品質量和性能的可靠性,行業組織和相關機構開始制定一系列的標準和規范。這些標準涵蓋了機器人的設計、制造、性能測試、安全要求等多個方面。例如,規定了清潔機器人的清潔效...
2025-01-18 -
四川工業光伏清潔機器人銷售公司
自動手動暴雪清潔模式切換:根據環境狀況和光伏板的臟污程度,自動手動暴雪清潔模式切換。通過內置的環境傳感器和圖像識別系統,它可以實時監測環境的濕度、溫度、灰塵濃度等信息,以及光伏板表面的臟污情況。在輕度臟污時,它會采用節能模式,降低清潔刷頭的轉速和清潔液的使用量...
2025-01-18 -
安徽自動化光伏清潔機器人銷售公司
濕度影響:在高濕度環境下,如沿海地區、熱帶雨林地區,空氣濕度常常超過 80%。光伏板表面容易形成水汽凝結,與灰塵混合后形成更難清潔的污漬。這些污漬具有粘性,且可能含有微生物,會在光伏板表面滋生繁殖。光伏清潔機器人若不能有效應對這種情況,清潔效果就會大打折扣。所...
2025-01-18 -
江西國內光伏清潔機器人廠家直銷
防水防塵設計:憑借高等級的 IP67 防水防塵設計,該機器人能夠有效抵御雨水和沙塵的侵蝕。其外殼采用一體化密封結構,所有的接口和縫隙都經過特殊處理,確保水和灰塵無法進入內部。即使在暴雨傾盆的惡劣天氣下,降雨量達到每小時 50 毫米以上,或者沙塵彌漫的環境中,沙...
2025-01-18 -
江蘇環保光伏清潔機器人共同合作
大型地面集中式光伏電站:在廣袤無垠的沙漠、荒地等區域,大型地面集中式光伏電站拔地而起,其光伏板占地面積廣闊。光伏清潔機器人能夠沿著預先鋪設的軌道,井然有序地對海量光伏板展開清潔作業,高效地解決了人工清潔耗時耗力的難題,有力地確保了電站發電的穩定性。 ...
2025-01-17 -
 山東自動化光伏清潔機器人有哪些
山東自動化光伏清潔機器人有哪些光伏機器人的應用場景: 水面漂浮光伏電站:水面漂浮光伏電站一般建設在湖泊、水庫等水域之上。具備防水功能的光伏清潔機器人可在水面平穩行駛,對光伏板表面的灰塵和水藻進行清理,有效避免因臟污問題導致發電效率降低,同時在清潔過程中切實保護水體環境不受污染。 ...
2025-01-17 -
陜西供應光伏清潔機器人代理價錢
關鍵技術突破期(智能化發展):在 2010 年左右,光伏清潔機器人迎來了關鍵技術突破。人工智能和圖像識別技術的融入,使機器人具備了智能化的 “眼睛”。通過圖像識別,機器人能夠準確識別光伏板的位置、表面臟污程度以及障礙物等信息。同時,導航技術也取得重大進展,激光...
2025-01-17 -
 山東銷售光伏清潔機器人價格合理
山東銷售光伏清潔機器人價格合理自動手動暴雪清潔模式切換:根據環境狀況和光伏板的臟污程度,自動手動暴雪清潔模式切換。通過內置的環境傳感器和圖像識別系統,它可以實時監測環境的濕度、溫度、灰塵濃度等信息,以及光伏板表面的臟污情況。在輕度臟污時,它會采用節能模式,降低清潔刷頭的轉速和清潔液的使用量...
2025-01-17 -
 云南直銷光伏清潔機器人服務電話
云南直銷光伏清潔機器人服務電話安裝位置不準確:若光伏清潔機器人的安裝位置出現偏差,在運行過程中可能會發生偏移、碰撞等問題。安裝時若定位不準確,機器人在沿著軌道或預設路徑移動時,可能會偏離正常路線,與光伏板邊框、支架等發生碰撞。這不僅會損壞機器人自身,如導致輪子變形、外殼破裂、清潔部件損壞等...
2025-01-17 -
上海光伏清潔機器人服務電話
穩定爬坡能力:對于山地等具有坡度的光伏電站,該機器人具備穩定的爬坡能力,能夠輕松攀爬 20° - 30° 的斜坡。它采用特殊的行走機構,增加了與地面的摩擦力。同時,配備了大功率的驅動電機和先進的動力分配系統,能夠根據坡度的變化自動調整動力輸出。在爬坡過程中,機...
2025-01-16 -
貴州新能源光伏清潔機器人哪家好
爬坡能力不足:在山地等具有坡度的光伏電站中,光伏板通常安裝在不同坡度的山坡上。若光伏清潔機器人的爬坡能力不足,就無法順利到達高處的光伏板進行清潔。一般來說,山地光伏電站的坡度在 10° - 30° 之間,部分區域甚至可達 40°。爬坡能力不足的機器人在面對這些...
2025-01-16 -
天津銷售光伏清潔機器人共同合作
集成化發展期(與其他系統融合):近年來,光伏清潔機器人朝著集成化方向發展。一方面,與光伏電站的監控系統進行深度融合,機器人可以實時將清潔狀態、自身運行狀況等信息反饋給監控中心,工作人員通過監控系統就能遠程了解機器人的工作情況,并進行必要的操作和調整。另一方面,...
2025-01-16 -
北京集成光伏清潔機器人生產廠家
關鍵技術突破期(智能化發展):在 2010 年左右,光伏清潔機器人迎來了關鍵技術突破。人工智能和圖像識別技術的融入,使機器人具備了智能化的 “眼睛”。通過圖像識別,機器人能夠準確識別光伏板的位置、表面臟污程度以及障礙物等信息。同時,導航技術也取得重大進展,激光...
2025-01-16 -
陜西國內光伏清潔機器人代理價錢
軌道損壞:對于采用軌道運行的光伏清潔機器人,軌道是其運行的基礎。若軌道出現損壞,如變形、斷裂等情況,機器人的運行將受到阻礙。軌道在長期使用過程中,可能會因承受機器人的重量、溫度變化、外力撞擊等因素而發生變形。例如,在冬季寒冷地區,軌道可能因熱脹冷縮而出現裂縫;...
2025-01-16 -
上海直銷光伏清潔機器人廠家現貨
產品優化期(性能提升):隨著市場需求的增加,光伏清潔機器人制造商開始不斷優化產品性能。在硬件方面,進一步改進機器人的結構設計,使其更加堅固耐用,能夠適應不同的戶外環境,如高溫、沙塵、大風等惡劣條件。同時,提高清潔部件的質量和壽命,降低維護頻率。在軟件方面,不...
2025-01-15 -
工業光伏清潔機器人服務電話
標準化推進期(行業規范形成):隨著光伏清潔機器人市場的不斷擴大,標準化問題日益受到重視。為了確保產品質量和性能的可靠性,行業組織和相關機構開始制定一系列的標準和規范。這些標準涵蓋了機器人的設計、制造、性能測試、安全要求等多個方面。例如,規定了清潔機器人的清潔效...
2025-01-15 -
青海工業光伏清潔機器人哪家強
清潔部件磨損:清潔機器人的清潔刷頭、刮片等關鍵部件在長期高頻次的使用過程中,會不可避免地出現磨損。清潔刷頭一般由刷毛或海綿等材質制成,經過長時間的摩擦,刷毛會逐漸彎曲、斷裂,海綿也會失去彈性。刮片在與光伏板表面的不斷接觸中,刃口會逐漸變鈍。當清潔部件磨損嚴重時...
2025-01-15