長寧區(qū)搬運機械手廠家
一、搬運機械手簡介:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。二、產(chǎn)品特點:1. 各軸方向以極高的速度直線運行,可用伺服電機快速響應(yīng);2.連續(xù)工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設(shè)有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三坐標(biāo)搬運機械手,氣動抓手,PLC控制。南京高銳特起重機有限公司生產(chǎn)。長寧區(qū)搬運機械手廠家
一、搬運機械手簡介:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應(yīng); 2.連續(xù)工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設(shè)有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。合肥搬運機械手怎么選三坐標(biāo)搬運機械手,PLC控制。南京高銳特起重機有限公司生產(chǎn)。
一、搬運機械手簡介:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應(yīng);2.連續(xù)工作時間長;3.定位精度可達0.02mm; 4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設(shè)有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。
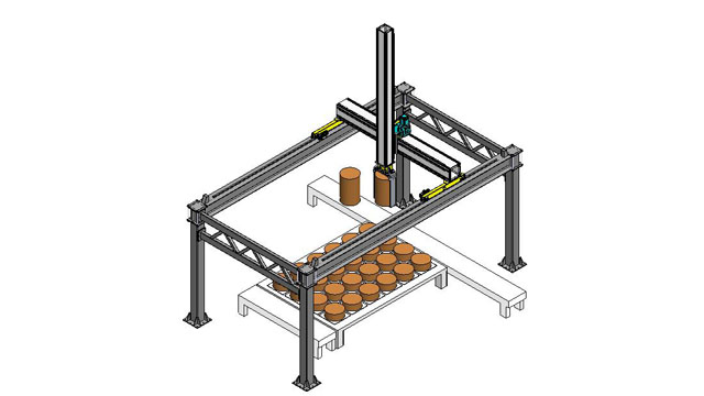
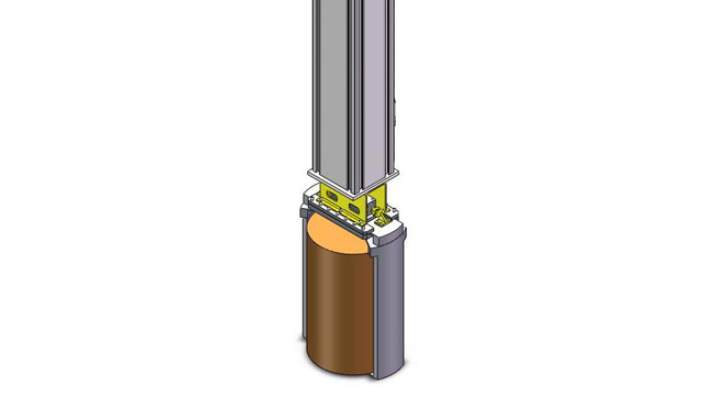
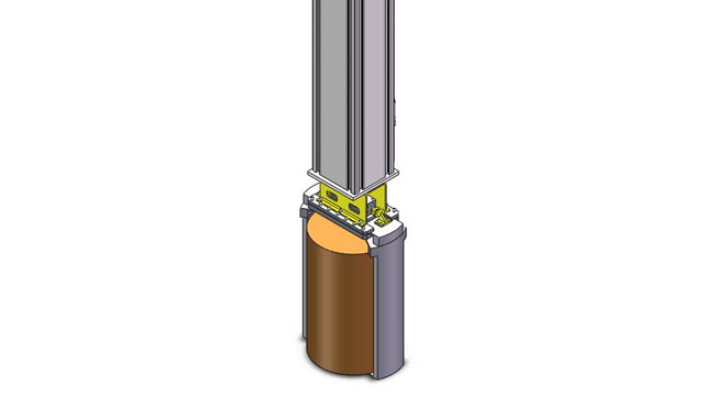
一、搬運機械手簡介:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。 二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應(yīng);2.連續(xù)工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設(shè)有斷氣保護裝置,防超程裝置等; 7.誤操作保護裝置。 三、搬運機械手產(chǎn)品構(gòu)成:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運行機構(gòu),采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構(gòu),采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構(gòu),采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現(xiàn)機械手的開閉,爪指采用內(nèi)爪式,傳感器檢測元件+機械限位;控制系統(tǒng),通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行。三坐標(biāo)搬運機械手,自動化程度高,南京高銳特生產(chǎn)。
一、搬運機械手簡介:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應(yīng);2.連續(xù)工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設(shè)有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。 三、搬運機械手產(chǎn)品構(gòu)成:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運行機構(gòu),采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構(gòu),采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構(gòu),采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現(xiàn)機械手的開閉,爪指采用內(nèi)爪式,傳感器檢測元件+機械限位;控制系統(tǒng),通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行。三坐標(biāo)搬運機械手,操作方式有半自動和全自動兩種。長寧區(qū)搬運機械手廠家
三坐標(biāo)搬運機械手哪家生產(chǎn),南京高銳特生產(chǎn)。長寧區(qū)搬運機械手廠家
一、搬運機械手簡介:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。 二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應(yīng);2.連續(xù)工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設(shè)有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。 三、搬運機械手產(chǎn)品構(gòu)成:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu)、Z軸升降機構(gòu)、抓取機械手、 導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運行機構(gòu),采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構(gòu),采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構(gòu),采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現(xiàn)機械手的開閉,爪指采用內(nèi)爪式,傳感器檢測元件+機械限位;控制系統(tǒng),通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行。長寧區(qū)搬運機械手廠家
- 河南定制防爆卷揚機供應(yīng)商 2025-06-09
- 定制防爆卷揚機 2025-06-09
- 上海固定防爆卷揚機生產(chǎn) 2025-06-09
- 安徽國內(nèi)防爆卷揚機生產(chǎn)商 2025-06-09
- 上海自動防爆卷揚機多少錢 2025-06-09
- 上海定制防爆卷揚機供應(yīng)商 2025-06-08
- 礦用防爆卷揚機廠家 2025-06-08
- 電動防爆卷揚機多少錢 2025-06-08
- 杭州手動防爆卷揚機哪家好 2025-06-08
- 上海自動防爆卷揚機報價 2025-06-08
- 嘉興輸送設(shè)備設(shè)計 2025-06-09
- 廣州全自動珍珠棉復(fù)合機現(xiàn)價 2025-06-09
- 廣東礦山機械蛇形彈簧大扭矩聯(lián)軸器生產(chǎn)廠家 2025-06-09
- 巴頓C36STAY40分子泵軸承銷售 2025-06-09
- 江門離心式空調(diào)風(fēng)機品牌 2025-06-09
- 新疆一級能效空壓站服務(wù) 2025-06-09
- 河南小型大型機械設(shè)備裝卸 2025-06-09
- 長春管件彎頭 2025-06-09
- 碳化硅砂輪制程工藝 2025-06-09
- 浙江茶多酚提取生產(chǎn)線設(shè)備哪家好 2025-06-09