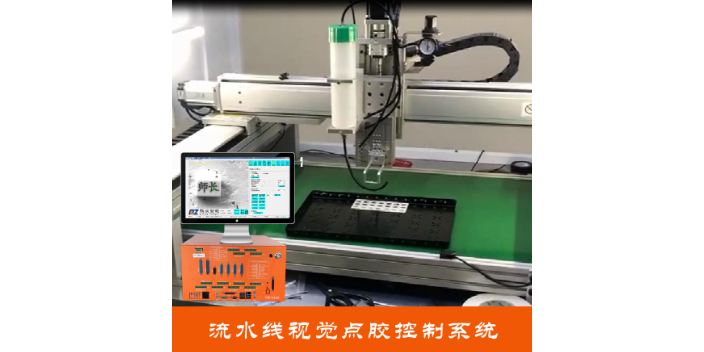
中山全景單工位視覺點膠系統制造商
視覺點膠系統通過使用相機和圖像處理算法實時檢測工件表面的特征。以下是一般的工作原理:相機采集圖像:系統中的相機負責將工件表面的圖像捕捉下來。相機可以設置在點膠頭旁邊或其它合適的位置,以獲得較好的視野和對工件表面的清晰成像。圖像處理:通過對相機捕獲的圖像進行處理,包括圖像濾波、光照校正、邊緣檢測、圖像分割等步驟,提取出工件表面的特征。這些特征需要是形狀、輪廓、顏色、紋理等信息。特征提取和分析:經過圖像處理后,系統會對特定的特征進行提取和分析。這可以包括測量工件的尺寸、位置、角度,檢測表面缺陷或異物等。特征匹配和定位:視覺點膠系統需要需要根據工藝要求將膠水精確地點在特定的位置或圖案上。通過特征匹配和定位算法,系統可以將檢測到的特征與預定義的目標特征進行對比,從而確定較好的點膠位置。視覺點膠系統支持MES通訊協議,方便與各類設備組網協作。中山全景單工位視覺點膠系統制造商
視覺點膠系統的日常維護:"1.定期清潔和檢查鏡頭,可以使用的清潔布或者棉簽輕輕擦拭鏡頭表面,以及定期檢查相機鏡頭是否固定穩固且垂直于加工臺面。2.定期檢查光源,點膠視覺系統需要光源來提供足夠的光亮度與均衡度,因此需要定期檢查燈光狀況3.定期校準系統:更換點膠閥、挪動設備或長時間使用后,可能會出現偏差,因此需要定期校準系統。4、定期檢查連接線路:檢查連接線路沒有松動或者接觸不良的情況,避免出現故障。"定期進行維護和保養,可以保證點膠視覺系統的穩定性和性能,延長設備使用壽命。 上海大視野視覺點膠系統公司電話視覺點膠系統集成智能軟件,操作簡便,新手也能快速上手。
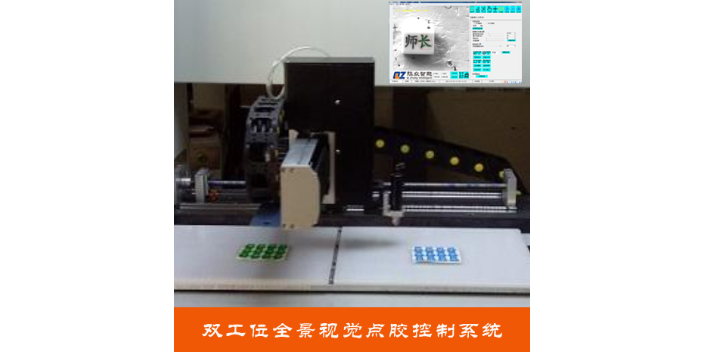
全景+局部雙重視覺定位視覺點膠系統是一種結合了全景視覺系統和局部視覺系統的點膠定位方案。它的原理是通過兩個不同的視覺系統協同工作,實現對工件的準確定位和點膠操作。全景視覺系統是系統的主要部分,它通常由一個或多個攝像頭組成,用于獲取工作環境中的全景圖像。這些攝像頭安裝在固定位置,可以涵蓋整個點膠工作區域。全景視覺系統使用高效的圖像處理算法對全景圖像進行分析和處理,提取出工件的整體特征和位置信息。局部視覺系統是系統的輔助部分,通常由一個或多個激光傳感器、攝像頭或其他高精度傳感器組成。它們用于對工件進行更細致的檢測和定位。局部視覺系統能夠獲取工件的局部特征,如邊緣、孔洞、標記點等,并提供更高精度的位置信息。在工作過程中,全景視覺系統首先獲取全景圖像,并使用圖像處理算法進行特征提取和目標識別,確定工件的大致位置和姿態。然后,局部視覺系統輔助進行更準確的定位,通過對工件進行細致的檢測和分析,提供更精確的位置信息。
視覺點膠系統哪個牌子好:"1、可以在網上做相關了解,了解公司的成立時長、發展歷程、發展方向、公司規模、行業口碑等;建議可以選與自己需要實現效果相關的點膠機控制系統;2、公司的研發實力和團隊,確保售后可以得到立即處理,能夠線下和線上及時配合解決技術難題。3、軟件系統運行穩定,易于操作上手,功能完善。4、了解視覺點膠機的生產工藝、生產情況、點膠情況,再根據自己的需求和成本去選擇。這樣才能找到品質過硬、價格合理、售后有保障的合作企業;" 視覺點膠系統搭配先進光源技術,確保產品圖像清晰穩定。
在設計視覺點膠系統的路徑時,需要考慮以下幾個因素:點膠位置:首先確定點膠的目標位置,即將膠水應用到工件上的具體的位置。這需要考慮點膠的精度要求、工件的形狀和尺寸等因素。點膠位置的準確性對于點膠系統的路徑設計非常重要。動作順序:確定點膠系統的動作順序,包括運動路徑和點膠動作之間的先后關系。操作人員需要考慮先后順序,以確保點膠過程的連續性和有效性。通常,點膠路徑設計應盡量避免重復移動和不必要的停頓。路徑規劃:路徑規劃是確定點膠系統如何從起始位置移動到目標點膠位置的過程。在路徑規劃中,需要考慮路徑的非常短、非常快或較好化等目標,并避免與工件或其他障礙物的碰撞。例如,可以使用路徑規劃算法,如A*算法、Dijkstra算法等,來自動規劃較好路徑。視覺點膠系統的高精度運動控制,確保點膠位置誤差極小。上海大視野視覺點膠系統公司電話
視覺點膠系統能自動識別產品缺陷,避免不良品流入下道工序。中山全景單工位視覺點膠系統制造商
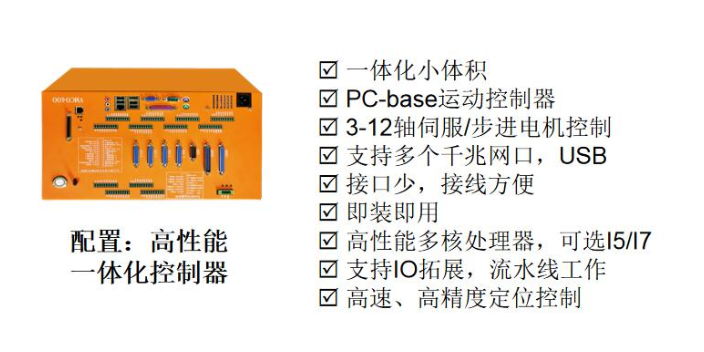
視覺點膠系統的反應速度可以因應用和系統配置而有所不同。一般情況下,視覺點膠系統具有較高的響應速度,能夠在毫秒級別內完成圖像捕捉、分析和決策,并將結果發送給控制系統進行點膠操作。這種快速響應的能力對于自動化生產線上的精確點膠非常重要,以確保點膠位置的準確性和精度。視覺點膠系統的反應速度受多個因素影響,包括相機和圖像處理算法的性能、控制系統的處理能力以及通信延遲等。現代的視覺點膠系統通常采用高性能的圖像處理器和快速的通信接口,以實現快速的圖像處理和數據傳輸,從而提高反應速度。此外,系統的硬件配置和優化、算法的優化和機械結構的設計也會對反應速度產生影響。中山全景單工位視覺點膠系統制造商
- 中山多工位視覺點膠系統品牌 2025-05-17
- 深圳引導視覺點膠系統咨詢 2025-05-17
- 佛山視覺點膠系統服務商 2025-05-17
- 中山流水線視覺點膠系統費 2025-05-17
- 東莞R軸旋轉視覺點膠系統廠家 2025-05-17
- 佛山引導視覺點膠系統單價 2025-05-17
- 中山全景單工位視覺點膠系統制造商 2025-05-17
- 惠州自動化視覺點膠系統公司 2025-05-17
- 睫毛視覺點膠系統專業廠家 2025-05-17
- 佛山滴膠機視覺點膠系統價格 2025-05-16
- 新疆鋁卷箱式氣氛保護爐非標定制 2025-05-17
- 梁溪區購買激光切割加工批量定制 2025-05-17
- 四川酒店智能開關價格多少 2025-05-17
- 韶關輕量型DOYO柔性振動盤自帶剎車功能 2025-05-17
- 坪山區定做全自動錫膏印刷機哪家好 2025-05-17
- 青浦區私人真空泵價格咨詢 2025-05-17
- 廣東型材機加工中心 2025-05-17
- 四川精密走心機品牌排行 2025-05-17
- 梅州物料智能倉庫 2025-05-17
- 天津智能倉儲管理系統是什么 2025-05-17