河南專業圖像標注
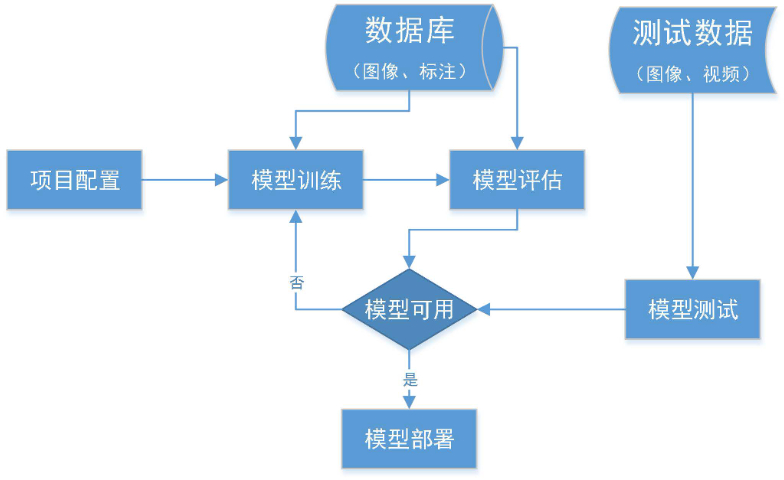
YOLO系列算法目前更新到YOLOv8。Yolo系列算法是典型的onestage算法,同樣,在算法設計上也注重目標區域的檢測以及特征的分類,這里目標區域的檢測采用的是和圖像區域分類定位的方式實現的。Yolo系列算法是一種比較成熟的目標檢測算法框架,基于這種框架的算法還在不斷地迭代中,當然解決的問題也越來越細化,比如候選區精度、比如小尺度檢測等。基本上YoloV3及以上版本的算法可以在很多場景下得到現實應用。2023年1月,目標檢測經典模型YOLO系列再添一個新成員YOLOv8,這是Ultralytics公司繼YOLOv5之后的又一次重大更新。YOLOv8一經發布就受到了業界的廣關注,成為了這幾天業界的流量擔當。SpeedDP能夠進行算法模型的提升。河南專業圖像標注

在如今的作業中,無人機路面巡查替代傳統的人工巡查,展現出巨大的效率優勢。像高速施工工地這樣的環境下,施工方為了保障施工安全,就需要對施工范圍進行嚴格管控,傳統的人工巡查效率低,受限于地形、時間等問題,容易出現盲點。相比人工,利用無人機進行AI識別則可以逐幀圖像監測,即便是夜晚也能夠利用紅外傳感器進行數據收集,幾乎不會遺漏任何信息。而交通管理部門,則可以利用無人機快速到底事故地點進行疏導,緩解交通壓力。山東信息化圖像標注SpeedDP是一個降本增效的好平臺。
小興安嶺的日常巡護,是構筑東北生態安全的必要措施,進入冬季,整個小興安嶺將處于冰雪覆蓋,按照傳統的巡檢模式,危險且費力。整個小興安嶺森林覆蓋率達到96%,只靠肉眼的觀察,很容易錯過死角空白區的潛在危險,因此,無人機上線了。將無人機智能化,在吊艙的基礎上加裝具備智能圖像處理的板卡,再通過定制算法的植入,一個智慧“巡檢員”就上線了。面對大森林這樣復雜的環境,成都慧視開發的高性能AI圖像處理板Viztra-HE030可以勝任,這塊板卡采用了瑞芯微旗艦級芯片RK3588,能夠輸出6.0TOPS的算力,考慮到小興安嶺冬天寒冷的環境,這款板卡能夠適應零下40℃的環境,長時間的戶外工作不在話下。
利用圖像處理技術實現導彈的遠程打擊是一項運用了比較長時間的技術,相比于現代化的電子控制,它具備低受干擾的特點,特別是無人機在軍備領域的廣泛應用,圖像處理的作用重新受到重視。遠程打擊時,需要對整個彈的識別能力進行深度學習訓練,不斷的訓練能夠讓AI更加聰明,讓AI知道該打擊什么,從而提升打擊精度。在前期的試驗印證階段,需要進行大量反復的試驗訓練,通過在導彈前端植入導引頭,給導彈裝上眼睛,可以實時記錄導彈打出后的視頻畫面,然后將大量的視頻數據采集到一起用于分析改進。SpeedDP是一個降本增效的好工具。
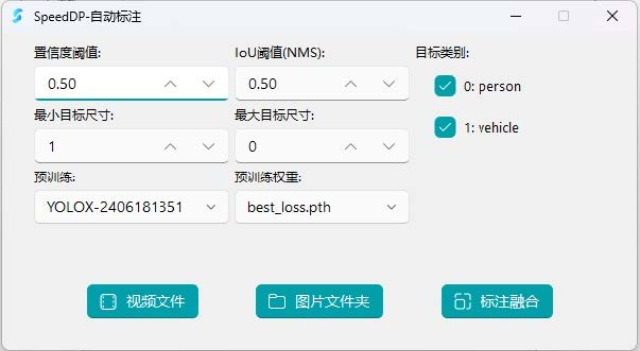
圖像識別方法可以分為兩大類,模型方法和搜索方法。模型方法是在業界研究和使用比較多的方法。模型的方法是試圖通過一些已知“標簽”的圖像,通過機器學習的各種方法來學習一個描述這些標簽的“模型”,從而,對于一個新的未知圖像,經過這個模型判斷出其應該具有的標簽。基于搜索的方法是在大數據時代才出現的方法,其基礎是將已知標簽的圖像數據建成一個可以進行高效率檢索的數據庫,稱為圖像索引。通常需要大量的圖像來建索引,但圖像的標簽可以有少量的噪聲。那么,對一副待測圖像,我們到這個數據庫中去找與其相同或者相似的若干圖像,然后綜合這些圖像的標簽來預測待測圖像的標簽。SpeedDP標注圖像很快速。廣西安全圖像標注
SpeedDP能夠幫助進行算法模型的測試驗證。河南專業圖像標注
無人機能夠通過高空拍攝快速獲取大范圍、多角度的地面信息。但是傳統的攝像頭只能獲取視頻數據,對于許多需要進行數據分析的行業來說顯然不夠智能化,從無人機視頻數據中快速獲取提煉大量有價值的信息,不僅能夠提升工作效率,還能夠減少不小的成本支出。這就是無人機的AI識別能力。通過識別算法,在無人機工作時就對目標范圍進行AI檢測識別,從而提煉所需信息。這就需要對無人機進行智能化改造,可以在傳統無人機吊艙中植入成都慧視開發的高性能AI圖像處理板,如利用RK3588深度開發而成的Viztra-HE030圖像處理板,6.0TOPS的算力能夠快速處理無人機識別到的復雜畫面信息,這樣就有了硬件基礎,剩下的就需要對自身算法進行不斷優化提升。河南專業圖像標注
- 天津哪里有圖像標注什么價格 2025-05-29
- 性價比高圖像識別模塊應用 2025-05-29
- 河北RK3399Pro主板圖像識別模塊軟件定制 2025-05-29
- 貴州**級圖像識別模塊設備 2025-05-29
- 四川自主研發圖像識別模塊AI智能 2025-05-29
- 成都圖形圖像識別模塊方法 2025-05-29
- 廣東省時省力圖像標注優勢 2025-05-29
- 天津安全圖像標注應用 2025-05-29
- 貴州**級圖像識別模塊技術 2025-05-29
- 上海比較好的圖像標注哪里買 2025-05-28
- 河南快速響應模擬屏智能化管理系統 2025-05-29
- 河南GPS多少錢 2025-05-29
- 遼寧流量卡什么牌子好 2025-05-29
- 梁溪區智能化無線通信五星服務 2025-05-29
- 湖北高密OCB 2025-05-29
- 韶關手表代加工廠哪里找 2025-05-29
- 陜西智能化北斗應急救援頭盔B3藍牙連接APP 2025-05-29
- 寧夏遠距離激光對射 2025-05-29
- 寶山區質量增強型無線通信設備規格尺寸 2025-05-29
- 天津哪里有圖像標注什么價格 2025-05-29