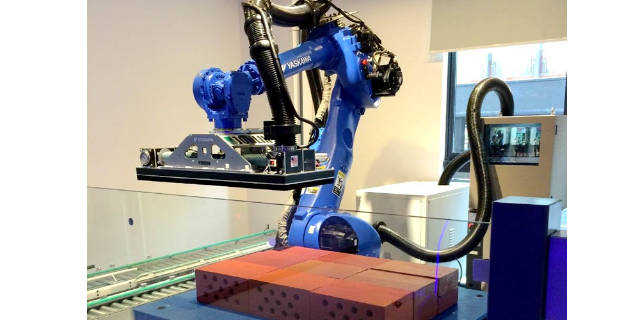
安徽ABB碼垛機械手
碼垛機器人的工作原理主要包括以下幾個步驟然后,機器人通過傳感器感知貨物的重量、尺寸、形狀等信息,以便確定如何比較好地擺放貨物。接下來,機器人使用機械臂或其他工具抓取貨物并將其移動到指定的位置進行碼垛。完成碼垛任務后,機器人會發(fā)送一個信號,表明任務已完成,然后可以被重新編程或清潔以備下一次使用。碼垛機器人綜合運用了機械與精密機械、微電子與計算機、自動控制與驅(qū)動、傳感器與信息處理以及人工智能等多學科的新的研究成果。它的主要技術(shù)原理包括機器視覺技術(shù)、運動控制技術(shù)和機器人控制技術(shù)。這些技術(shù)使得碼垛機器人能夠精細地獲取貨物的位置、形狀、大小等信息,實現(xiàn)精細的運動控制和定位,以及自主的決策和控制。全自動碼垛機能夠提高生產(chǎn)效率,降低生產(chǎn)成本,減少人為錯誤和損壞,提高產(chǎn)品質(zhì)量和安全性。安徽ABB碼垛機械手

包裝碼垛機器人特點:操作簡單:全部控制可在控制柜屏幕上進行,操作非常直觀簡單。教示方法簡單易懂,只需定位抓起點和擺放點。此外,包裝碼垛機器人還通常具有先進的視覺和位置識別技術(shù),能夠快速準確地執(zhí)行碼垛任務。一臺包裝碼垛機器人可以代替多個工人的工作量,很大地提高了生產(chǎn)效率。同時,它們配備了精密的傳感器和優(yōu)化的控制系統(tǒng),確保在執(zhí)行任務時的安全性和可靠性。高效性:包裝碼垛機器人能夠連續(xù)、快速地工作,不受疲勞、情緒等人為因素的影響。它們可以在短時間內(nèi)完成大量的碼垛任務,顯著提高生產(chǎn)效率。北京高位碼垛機哪家強碼垛生產(chǎn)線還可以根據(jù)需要進行定制,以適應不同產(chǎn)品的碼垛需求。
人工碼垛:對于一些小型企業(yè)或者產(chǎn)品規(guī)格變化較大的企業(yè)來說,人工碼垛可能是一個更經(jīng)濟、更靈活的選擇。人工碼垛可以根據(jù)產(chǎn)品的實際情況進行調(diào)整,適應性強,但缺點是效率低下,且易受人為因素影響。半自動碼垛設備:半自動碼垛設備結(jié)合了人工和自動碼垛的優(yōu)點,可以在一定程度上提高生產(chǎn)效率,同時保持一定的靈活性。這種設備通常需要人工輔助操作,如人工將產(chǎn)品放置在設備上,設備再自動完成碼垛過程。定制化的自動碼垛解決方案:對于一些有特殊需求的企業(yè),可以選擇定制化的自動碼垛解決方案。這種方案可以根據(jù)企業(yè)的產(chǎn)品特點、生產(chǎn)流程等實際情況進行設計和實施,以達到比較好的碼垛效果。但缺點是成本較高,且需要專業(yè)的技術(shù)支持。
高位碼垛搬運指的是使用高位碼垛機進行貨物的碼垛和搬運的過程。具體來說,當貨物通過生產(chǎn)線或其他方式輸送到高位碼垛機的工作區(qū)域時,該機器會利用傳感器和控制系統(tǒng)對貨物進行識別和定位。接著,根據(jù)預設的碼垛規(guī)則和算法,高位碼垛機會自動地將貨物按照一定的順序和位置碼放在托盤或其他載體上,形成一個穩(wěn)定且整齊的垛堆。完成碼垛后,高位碼垛機可以將垛堆搬運到指定的位置,如貨架、倉庫或運輸車輛上。高位碼垛機在物流、食品、制造和物料搬運等行業(yè)中有著廣泛的應用。它們能夠 提高生產(chǎn)效率和搬運的準確性,降低人工成本和勞動強度,同時還能夠確保貨物的質(zhì)量和安全。包裝碼垛機器人還通常具有視覺和位置識別技術(shù)。

全自動碼垛機械手具有以下明顯特點:自動化程度高:全自動碼垛機械手能夠自動完成產(chǎn)品的碼垛作業(yè),無需人工直接參與, 提高了生產(chǎn)效率。精度高:通過先進的傳感器和控制系統(tǒng),全自動碼垛機械手能夠準確地識別和定位產(chǎn)品,確保碼垛的準確性和穩(wěn)定性。靈活性強:全自動碼垛機械手可以根據(jù)不同的生產(chǎn)需求和產(chǎn)品特點進行定制和調(diào)整,具有較強的適應性和靈活性。可靠性高:全自動碼垛機械手采用品質(zhì)高的材料和先進的制造工藝,具有較高的耐用性和可靠性,能夠長時間穩(wěn)定運行。包裝碼垛機器人在現(xiàn)代工業(yè)自動化領域中具有廣泛的應用前景。揚州包裝碼垛包裝生產(chǎn)線
包裝碼垛機器人能夠根據(jù)生產(chǎn)線的需求和預設的程序進行準確操作。安徽ABB碼垛機械手
全自動碼垛機的使用方法主要包括以下步驟:將貨物放入貨架:確保貨物整齊劃一,不能隨意堆放,以便于碼垛機準確抓取。打開碼垛機:按照操作要求打開全自動碼垛機的總開關,確保電控箱內(nèi)所有開關都已開啟。此時,操作面板上的相關指示燈應該會亮起。碼垛機準備:進行碼垛前的準備工作,如打開主氣源閥以釋放設備內(nèi)的積水,給托盤倉添加足夠的空托盤,確保兩個急停開關都已松開等。將貨物放入碼垛機:在確認工作區(qū)域內(nèi)沒有人和雜物后,可以開始將貨物放入碼垛機中。這個步驟需要根據(jù)具體的碼垛機型號和貨物類型來操作。安徽ABB碼垛機械手
- 常州電鍍涂裝設備產(chǎn)品介紹 2025-06-26
- 連云港噴涂涂裝設備哪里有賣的 2025-06-26
- 無錫噴涂涂裝設備哪里有賣的 2025-06-26
- 上海前處理涂裝設備哪個品牌好 2025-06-25
- 浙江汽車涂裝設備費用 2025-06-25
- 上海油漆涂裝設備促銷價 2025-06-25
- 蘇州靜電粉末涂裝設備訂購 2025-06-25
- 陜西全自動涂裝設備市場價格 2025-06-25
- 山東自動涂裝設備選擇 2025-06-25
- 江蘇靜電粉末涂裝設備有哪些 2025-06-25
- 長寧區(qū)SMT貼裝類型 2025-06-26
- 常州固定式皮帶輸送機故障維修 2025-06-26
- 普陀區(qū)小型TOKYODIAMOND服務放心可靠 2025-06-26
- 無尾料鋁管切割機 2025-06-26
- 蘇州碳鋼熱處理技術(shù) 2025-06-26
- 寧波恩斯克轉(zhuǎn)向器傳感器 2025-06-26
- 重慶汽車零部件3D砂型打印 2025-06-26
- 新鄉(xiāng)銷售塑料粉碎機怎么用 2025-06-26
- 循環(huán)泵選型 2025-06-26
- 北京XH同步帶供貨商 2025-06-26