-
 寶山區(qū)品質(zhì)自動化控制系統(tǒng)聯(lián)系方式
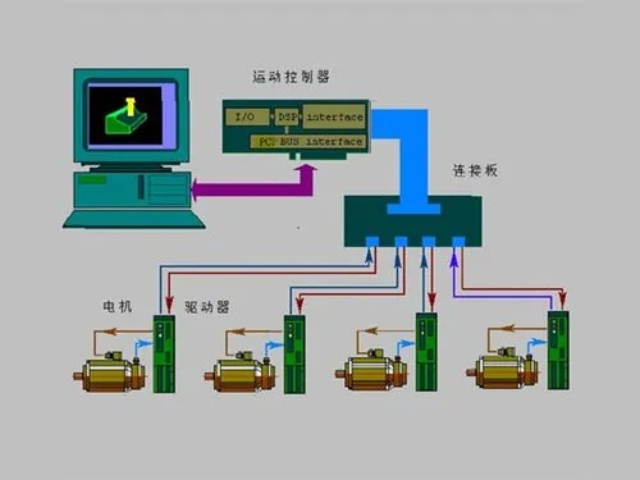
寶山區(qū)品質(zhì)自動化控制系統(tǒng)聯(lián)系方式第五代過程控制體系(FCS,F(xiàn)ieldbus Control System現(xiàn)場總線控制系統(tǒng)):FCS是從DCS發(fā)展而來,就象DCS從CCS發(fā)展過來一樣,有了質(zhì)的飛躍。“分散控制”發(fā)展到“現(xiàn)場控制”;數(shù)據(jù)的傳輸采用“總線”方式。但是FCS與DCS的真正的區(qū)別在于...
2025-05-29 -
 寶山區(qū)直銷機器視覺系統(tǒng)系列
寶山區(qū)直銷機器視覺系統(tǒng)系列70年代,機器視覺形成幾個重要研究分支:①目標制導的圖像處理;②圖像處理和分析的并行算法;③從二維圖像提取三維信息;④序列圖像分析和運動參量求值;⑤視覺知識的表示;⑥視覺系統(tǒng)的知識庫等。機器視覺的阿喀琉斯之踵:據(jù)麻省理工《技術(shù)評論》報道,來自谷歌和OpenAI...
2025-05-28 -
 普陀區(qū)直銷自動化控制系統(tǒng)來電咨詢
普陀區(qū)直銷自動化控制系統(tǒng)來電咨詢1、 40年代--60年代初:需求動力:市場競爭,資源利用,減輕勞動強度,提高產(chǎn)品質(zhì)量,適應(yīng)批量生產(chǎn)需要。主要特點:此階段主要為單機自動化階段,主要特點是:各種單機自動化加工設(shè)備出現(xiàn),并不斷擴大應(yīng)用和向縱深方向發(fā)展。典型成果和產(chǎn)品:硬件數(shù)控系統(tǒng)的數(shù)控機床。2、...
2025-05-28 -
 金山區(qū)特定自動化控制系統(tǒng)發(fā)展
金山區(qū)特定自動化控制系統(tǒng)發(fā)展3、70年代中期--至今:需求動力:市場環(huán)境的變化,使多品種、中小批量生產(chǎn)中普遍性問題愈發(fā)嚴重,要求自動化技術(shù)向其廣度和深度發(fā)展,使其各相關(guān)技術(shù)高度綜合,發(fā)揮整體比較好效能。主要特點:自70年代初期美國學者***提出CIM概念至今,自動化領(lǐng)域已發(fā)生了巨大變化,...
2025-05-28 -
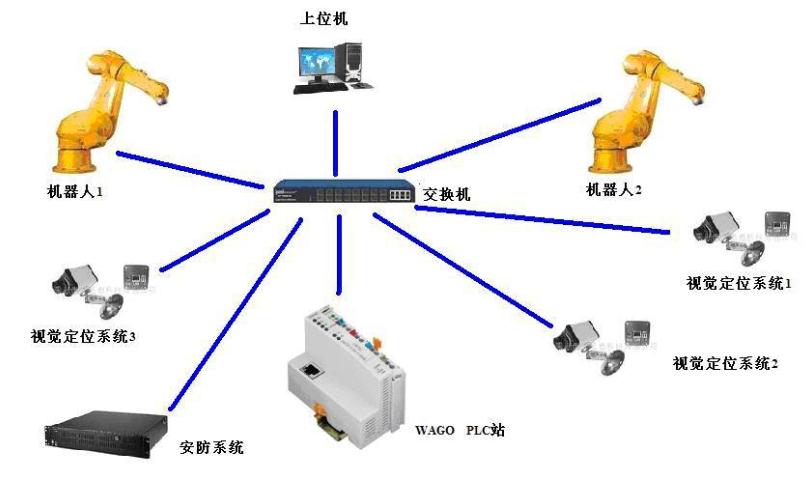
 寶山區(qū)特定機器視覺系統(tǒng)結(jié)構(gòu)圖
寶山區(qū)特定機器視覺系統(tǒng)結(jié)構(gòu)圖魯棒性:另一個測試好光源的方法是看光源是否對部件的位置敏感度**小。當光源放置在攝像頭視野的不同區(qū)域或不同角度時,結(jié)果圖像應(yīng)該不會隨之變化。方向性很強的光源,增大了對高亮區(qū)域的鏡面反射發(fā)生的可能性,這不利于后面的特征提取。好的光源需要能夠使你需要尋找的特征非常...
2025-05-27 -
 崇明區(qū)工業(yè)自動化控制系統(tǒng)什么價格
崇明區(qū)工業(yè)自動化控制系統(tǒng)什么價格第四代過程控制體系(DCS,Distributed Control System分布式控制系統(tǒng)):隨著半導體制造技術(shù)的飛速發(fā)展,微處理器的普遍使用,計算機技術(shù)可靠性的大幅度增加,目前普遍使用的是第四代過程控制體系(DCS,或分布式數(shù)字控制系統(tǒng)),它主要特點是整...
2025-05-27 -
 楊浦區(qū)特定機器視覺系統(tǒng)歡迎來電
楊浦區(qū)特定機器視覺系統(tǒng)歡迎來電照明系統(tǒng)按其照射方法可分為:背向照明、前向照明、結(jié)構(gòu)光和頻閃光照明等。其中,背向照明是被測物放在光源和攝像機之間,它的優(yōu)點是能獲得高對比度的圖像。前向照明是光源和攝像機位于被測物的同側(cè),這種方式便于安裝。結(jié)構(gòu)光照明是將光柵或線光源等投射到被測物上,根據(jù)它們產(chǎn)生...
2025-05-26 -
松江區(qū)工程機器視覺系統(tǒng)價格表格
在布匹的生產(chǎn)過程中,像布匹質(zhì)量檢測這種有高度重復性和智能性的工作只能靠人工檢測來完成,在現(xiàn)代化流水線后面常常可看到很多的檢測工人來執(zhí)行這道工序,給企業(yè)增加巨大的人工成本和管理成本的同時,卻仍然不能保證100 %的檢驗合格率(即“零缺陷”)。對布匹質(zhì)量的檢測是重...
2025-05-26 -
寶山區(qū)新能源自動化控制系統(tǒng)廠家批發(fā)價
尼可爾斯(Nichols)就在這個模擬機上做了大量的仿真實驗,***列出來這個PID的整定表,50年過去了現(xiàn)在大家還在用。有一樣工作50年不變的就是尼可爾斯(Nichols)發(fā)明的這個PID整定表。這個是***的,***結(jié)束以后,他們才把工作展現(xiàn)出來。這一本書...
2025-05-26 -
浦東新區(qū)什么是機器視覺系統(tǒng)來電咨詢
由于上述原因,圖像識別處理時應(yīng)采取相應(yīng)的算法,提取雜質(zhì)的特征,進行模式識別,實現(xiàn)智能分析。Color檢測一般而言,從彩色CCD相機中獲取的圖像都是RGB圖像。也就是說每一個像素都由紅(R)綠(G)藍(B)三個成分組成,來表示RGB色彩空間中的一個點。問題在于這...
2025-05-25 -
普陀區(qū)工業(yè)機器視覺系統(tǒng)處理方法
⒌ 智能交通管理系統(tǒng):通過在交通要道放置攝像頭,當有違章車輛(如闖紅燈)時,攝像頭將車輛的牌照拍攝下來,傳輸給**管理系統(tǒng),系統(tǒng)利用圖像處理技術(shù),對拍攝的圖片進行分析,提取出車牌號,存儲在數(shù)據(jù)庫中,可以供管理人員進行檢索。⒍金相分析:金相圖象分析系統(tǒng)能對金屬或...
2025-05-25 -
普陀區(qū)進口機器視覺系統(tǒng)拆裝
70年代,機器視覺形成幾個重要研究分支:①目標制導的圖像處理;②圖像處理和分析的并行算法;③從二維圖像提取三維信息;④序列圖像分析和運動參量求值;⑤視覺知識的表示;⑥視覺系統(tǒng)的知識庫等。機器視覺的阿喀琉斯之踵:據(jù)麻省理工《技術(shù)評論》報道,來自谷歌和OpenAI...
2025-05-25 -
 松江區(qū)什么是自動化控制系統(tǒng)對比
松江區(qū)什么是自動化控制系統(tǒng)對比中國的工業(yè)自動化市場主體主要由軟硬件制造商、系統(tǒng)集成商、產(chǎn)品分銷商等組成。在軟硬件產(chǎn)品領(lǐng)域,中**市場幾乎全部由國外***品牌產(chǎn)品壟斷,并將仍維持此種局面;在系統(tǒng)集成領(lǐng)域,跨國公司占據(jù)制造業(yè)的**,具有深厚行業(yè)背景的公司在相關(guān)行業(yè)系統(tǒng)集成業(yè)務(wù)中占據(jù)主動,具有豐...
2025-05-24 -
 靜安區(qū)新能源機器視覺系統(tǒng)質(zhì)量
靜安區(qū)新能源機器視覺系統(tǒng)質(zhì)量70年代,機器視覺形成幾個重要研究分支:①目標制導的圖像處理;②圖像處理和分析的并行算法;③從二維圖像提取三維信息;④序列圖像分析和運動參量求值;⑤視覺知識的表示;⑥視覺系統(tǒng)的知識庫等。機器視覺的阿喀琉斯之踵:據(jù)麻省理工《技術(shù)評論》報道,來自谷歌和OpenAI...
2025-05-24 -
虹口區(qū)品質(zhì)自動化控制系統(tǒng)系列
150多年前***代過程控制體系是基于5-13psi的氣動信號標準(氣動控制系統(tǒng)PCS,Pneumatic Control System)。簡單的就地操作模式,控制理論初步形成,尚未有控制室的概念。第二代過程控制體系(模擬式或ACS,Analog Contro...
2025-05-24 -
浦東新區(qū)品質(zhì)自動化控制系統(tǒng)怎么樣
是整個在二十世紀40年代,前面的是個技術(shù)的發(fā)展過程,慢慢形成理論了。我習慣上用這么一個時間表來表示。50年代的時候,一般都叫經(jīng)典控制理論; 60年代叫狀態(tài)空間法,實際上就是狀態(tài)空間方法,但是呢,當時的名稱,把它叫做現(xiàn)代控制理論了;后來70年代是現(xiàn)代頻域法,這么...
2025-05-24 -
浦東新區(qū)小型自動化控制系統(tǒng)執(zhí)行標準
布萊克已經(jīng)在這個之前,專門研究了電子振蕩器,電子振蕩器是用反饋工作的,當然是正反饋了,所以他有這個基礎(chǔ)。就是他有工作的積累,布萊克有很多用反饋原理構(gòu)成振蕩器線路的這些工作基礎(chǔ),完了老在想這個問題,這樣靈感就出來了,就做出來這個負反饋放大器,這是一個人,應(yīng)該要提...
2025-05-24 -
寶山區(qū)品質(zhì)機器視覺系統(tǒng)哪里買
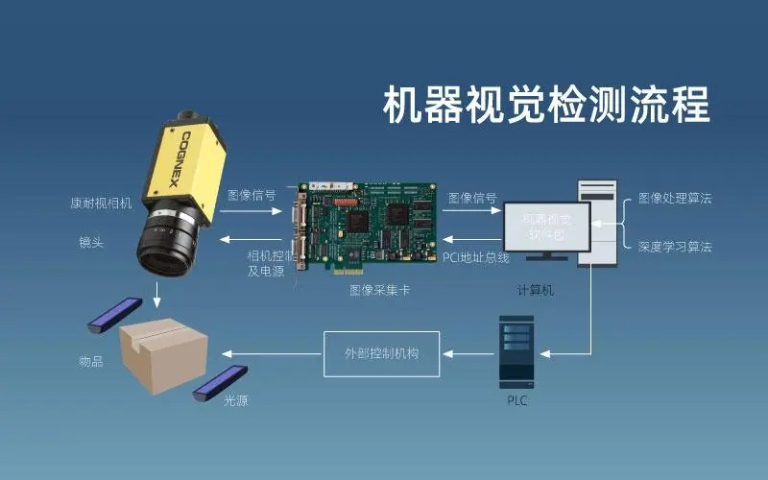
機器視覺是人工智能正在快速發(fā)展的一個分支。簡單說來,機器視覺就是用機器代替人眼來做測量和判斷。機器視覺系統(tǒng)是通過機器視覺產(chǎn)品(即圖像攝取裝置,分CMOS和CCD兩種)將被攝取目標轉(zhuǎn)換成圖像信號,傳送給**的圖像處理系統(tǒng),得到被攝目標的形態(tài)信息,根據(jù)像素分布和亮...
2025-05-24 -
黃浦區(qū)威力自動化控制系統(tǒng)市場價格
自動控制能自動調(diào)節(jié)、檢測、加工的機器設(shè)備、儀表,按規(guī)定的程序或指令自動進行作業(yè)的技術(shù)措施。其目的在于增加產(chǎn)量、提高質(zhì)量、降低成本和勞動強度、保障生產(chǎn)安全等。自動控制系統(tǒng)理論自動控制是相對人工控制概念而言的,指的是在沒人參與的情況下,利用控制裝置使被控對象或過程...
2025-05-24 -
金山區(qū)進口機器視覺系統(tǒng)聯(lián)系方式
用邊緣檢測技術(shù)來確定輪廓線,用區(qū)域分析技術(shù)將圖像劃分為由灰度相近的像素組成的區(qū)域,這些技術(shù)統(tǒng)稱為圖像分割。其目的在于用輪廓線和區(qū)域?qū)λ治龅膱D像進行描述,以便同機內(nèi)存儲的模型進行比較匹配。實踐表明,只用自底向上的分析太困難,必須同時采用自頂向下,即把目標分為若...
2025-05-24 -
青浦區(qū)工程自動化控制系統(tǒng)采購信息
在這個同時,1877年,大家學判據(jù)的,有個代數(shù)判據(jù),勞斯代數(shù)判據(jù),勞斯判據(jù)怎么來的呢?我的記憶里邊,勞斯就是麥克斯維爾的學生,就可能相當于我們現(xiàn)在的博士生了,麥克斯維爾就是給了任務(wù),你把方程式根的性質(zhì)給我判別一下。***到1877年,勞斯把這個拿出來了,勞斯拿...
2025-05-23 -
松江區(qū)什么是機器視覺系統(tǒng)聯(lián)系方式
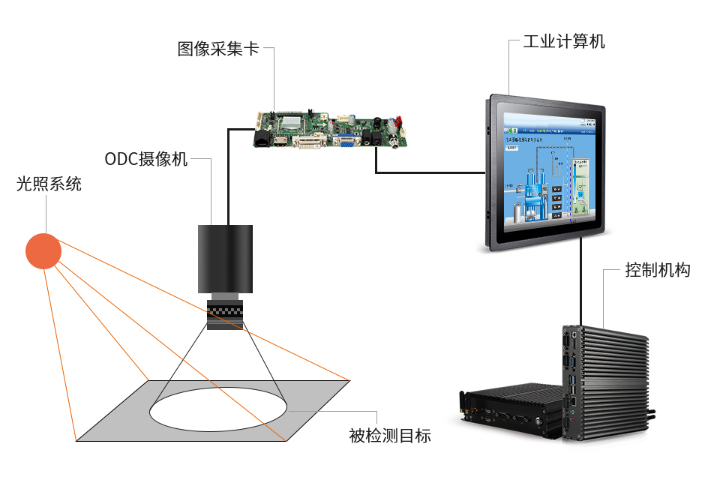
一個典型的機器視覺系統(tǒng)包括以下五大塊:照明照明是影響機器視覺系統(tǒng)輸入的重要因素,它直接影響輸入數(shù)據(jù)的質(zhì)量和應(yīng)用效果。由于沒有通用的機器視覺照明設(shè)備,所以針對每個特定的應(yīng)用實例,要選擇相應(yīng)的照明裝置,以達到比較好效果。光源可分為可見光和不可見光。常用的幾種可見光...
2025-05-23 -
浦東新區(qū)工業(yè)機器視覺系統(tǒng)內(nèi)容
集成產(chǎn)品增多智能相機的發(fā)展預示了集成產(chǎn)品增多的趨勢,智能相機是在一個單獨的盒內(nèi)集成了處理器、鏡頭、光源、輸入/輸出裝置及以太網(wǎng),電話和 PDA 推動了更快、更便宜的精簡指令集計算機(RISC)的發(fā)展,這使智能相機和嵌入式處理器的出現(xiàn)成為可能。同樣,現(xiàn)場可編程門...
2025-05-23 -
普陀區(qū)什么是自動化控制系統(tǒng)機械結(jié)構(gòu)
自動化控制有半自動與全自動化,自動化控制是一種現(xiàn)代工業(yè)、農(nóng)業(yè)、制造業(yè)等生產(chǎn)領(lǐng)域中機械電氣一體自動化集成控制技術(shù)和理論。自動化控制有半自動與全自動化自動化控制例如:機器、設(shè)備可以按照生產(chǎn)的要求和目的,進行自動化生產(chǎn);全自動人只需要作為操作員,確定控制的要求和程序...
2025-05-23 -
青浦區(qū)新能源機器視覺系統(tǒng)配件
⒎本系統(tǒng)可通過顯示圖像監(jiān)視檢測過程,也可通過界面顯示的檢測數(shù)據(jù)動態(tài)查看檢測結(jié)果;⒏具有對錯誤工件及時準確發(fā)出剔除控制信號、剔除廢品的功能;⒐系統(tǒng)能夠自檢其主要設(shè)備的狀態(tài)是否正常,配有狀態(tài)指示燈;同時能夠設(shè)置系統(tǒng)維護人員、使用人員不同的操作權(quán)限;⒑實時顯示檢測畫...
2025-05-23 -
徐匯區(qū)特定自動化控制系統(tǒng)生產(chǎn)過程
自動控制理論是研究自動控制共同規(guī)律的技術(shù)科學。它的發(fā)展初期,是以反饋理論為基礎(chǔ)的自動調(diào)節(jié)原理,主要用于工業(yè)控制,二戰(zhàn)期間為了設(shè)計和制造飛機及船用自動駕駛儀,火炮定位系統(tǒng),雷達跟蹤系統(tǒng)以及其他基于反饋原理的***設(shè)備,進一步促進并完善了自動控制理論的發(fā)展。二戰(zhàn)后...
2025-05-23 -
浦東新區(qū)新能源機器視覺系統(tǒng)價格表格
2.穩(wěn)定性高集成式機器視覺系統(tǒng)實現(xiàn)了圖像采集單元、圖像處理單元、圖像處理軟件、網(wǎng)絡(luò)通信裝置的高度集成。通過可靠性設(shè)計和測試,硬件兼容比從不同制造商購買的板卡、相機、PC組成的機器視覺系統(tǒng)更好,可以獲更高的穩(wěn)定性。3.體積小集成式機器視覺系統(tǒng)結(jié)構(gòu)緊湊,尺寸小,易...
2025-05-23 -
嘉定區(qū)小型自動化控制系統(tǒng)認真負責
隨著現(xiàn)代應(yīng)用數(shù)學新成果的推出和電子計算機的應(yīng)用,為適應(yīng)宇航技術(shù)的發(fā)展,自動控制理論跨入了一個新階段——現(xiàn)代控制理論。主要研究具有高性能,高精度的多變量變參數(shù)的比較好控制問題,主要采用的方法是以狀態(tài)為基礎(chǔ)的狀態(tài)空間法。目前,自動控制理論還在繼續(xù)發(fā)展,正向以控制論...
2025-05-23 -
閔行區(qū)特定機器視覺系統(tǒng)價格表格
魯棒性:另一個測試好光源的方法是看光源是否對部件的位置敏感度**小。當光源放置在攝像頭視野的不同區(qū)域或不同角度時,結(jié)果圖像應(yīng)該不會隨之變化。方向性很強的光源,增大了對高亮區(qū)域的鏡面反射發(fā)生的可能性,這不利于后面的特征提取。好的光源需要能夠使你需要尋找的特征非常...
2025-05-22 -
青浦區(qū)進口自動化控制系統(tǒng)編號
(4) 實時曲線界面:根據(jù)實驗的需要,選擇不同數(shù)據(jù),通過數(shù)據(jù)及曲線觀察和分析反應(yīng)過程。1、把傳統(tǒng)使用的加熱、攪拌等實驗設(shè)備,進行自動化集成,實現(xiàn)各實驗設(shè)備的一體化。2、整個化學反應(yīng)操作過程全部在自動化控制實驗平臺上進行,采用自動化控制技術(shù),利用實時參數(shù)表和實時...
2025-05-22