-
 小型自動化控制系統有幾種
小型自動化控制系統有幾種20世紀40年代中發明的電子數字計算機開創了數字程序控制的新紀元﹐雖然當時還局限于自動計算方面,但ENIAC和EDVAC的制造成功﹐開創了電子數字程序控制的新紀元。電子數字計算機的發明為60~70年代在控制系統中廣泛應用程序控制和邏輯控制以及廣泛應用電子數字計...
2025-06-17 -
 寶山區微型驅動器
寶山區微型驅動器在現代工業電網中,電壓諧波問題日益突出,這對無錫文亞機電自動化設備有限公司的驅動器產生了嚴重干擾。電壓諧波是由各種非線性用電設備,如變頻器、整流器等產生的。當這些諧波電壓疊加到正常的供電電壓上,輸入到文亞機電驅動器時,會使驅動器的工作狀態變得復雜。諧波電壓可能...
2025-06-17 -
山西購買自動化控制系統
特點優勢穩定性強:采用模塊化設計,抗干擾能力強,能在惡劣的工業環境下穩定運行,可長時間穩定工作。編程簡單:編程語言豐富,如梯形圖、指令表等,易于理解和掌握,工程師可以快速上手編寫程序,提高工作效率。維護方便:模塊化設計使得故障排查和維修更加便捷,即便出現故障,...
2025-06-17 -
 虹口區進口驅動器
虹口區進口驅動器溫度驟變同樣會對無錫文亞機電自動化設備有限公司的驅動器產生不利影響。在一些特殊工業場景,如冷庫與高溫加工車間交替作業的場所,驅動器可能短時間內經歷較大的溫度變化。溫度驟變會使驅動器內部不同材料的部件因熱脹冷縮程度不同,產生應力集中。例如,電路板與外殼之間的連接...
2025-06-17 -
 鹽城哪里有工業機器人
鹽城哪里有工業機器人在工業生產領域中,工業機器人的安裝至為重要,若是安裝出現問題,不僅會影響機器人設備的使用性能,同時還會導致工業機器人使用壽命降低,并會對工業生產安全造成影響,對企業的經濟效益造成損傷,因此做好工業機器人的安裝工作十分重要,結合以往的工作經驗,筆者認為在工業機器...
2025-06-17 -
 黑龍江哪些傳感器
黑龍江哪些傳感器壓阻式傳感器是根據半導體材料的壓阻效應在半導體材料的基片上經擴散電阻而制成的器件。其基片可直接作為測量傳感元件,擴散電阻在基片內接成電橋形式。當基片受到外力作用而產生形變時,各電阻值將發生變化,電橋就會產生相應的不平衡輸出。用作壓阻式傳感器的基片(或稱膜片)材...
2025-06-17 -
 普陀區哪里有自動化控制系統
普陀區哪里有自動化控制系統1946年,美國福特公司的機械工程師D.S.哈德較早提出“自動化”一詞,并用來描述發動機汽缸的自動傳送和加工的過程。50年代,自動調節器和經典控制理論的發展,使自動化進入以單變量自動調節系統為主的局部自動化階段。60年代,隨現代控制理論的出現和電子計算機的推廣...
2025-06-17 -
江蘇什么是驅動器
電源紋波是影響無錫文亞機電自動化設備有限公司驅動器運行的重要因素之一,其中發熱異常問題尤為突出。文亞機電驅動器在正常工作時,內部電路會有一定功耗產生熱量,而電源紋波的存在會加劇這一情況。由于紋波會導致驅動器內部電流出現波動,額外的電流波動使得電路元件工作狀態不...
2025-06-16 -
 鎮江附近哪里有工業機器人
鎮江附近哪里有工業機器人20世紀70年代,隨著計算機和人工智能技術的發展,機器人進入了實用化時代。像日立公司推出的具有觸覺、壓力傳感器,7軸交流電動機驅動的機器人;美國Milacron公司推出的世界***臺小型計算機控制的機器人,由電液伺服驅動,可跟蹤移動物體,用于裝配和多功能作業;...
2025-06-16 -
安徽附近傳感器
自檢、自校、自診斷功能——普通傳感器需要定期檢驗和標定,以保證它在正常使用時足夠的準確度,這些工作一般要求將傳感器從使用現場拆卸送到實驗室或檢驗部門進行。對于在線測量傳感器出現異常則不能及時診斷。采用智能傳感器情況則大有改觀,首先自診斷功能在電源接通時進行自檢...
2025-06-16 -
 浦東新區自動化控制系統圖片
浦東新區自動化控制系統圖片自動化控制包括半自動與全自動化,是現代農業、工業和制造業等生產領域中,機械電氣一體自動化的集成控制技術。自動化運用機械輔助工作,幫助人類擺脫了部分危險、繁重的工作,輕松了人類的勞作,提高了生產效率。自動化控制是工業、農業、**和科技現代化的重要標志,學習自動化...
2025-06-16 -
甘肅本地工業機器人
機器人的安裝是在在現場進行的,而真正的生產作業環境會受空間利用率等方面影響,致使機器人的很多姿態受到一定的限制,而這就很容易導致工業機器人在實際工作中,出現震動、移位等現象,并**終導致工業機器人無法按照設計的速度運作,因此在工業機器人安裝結束后,投入實際生產...
2025-06-16 -
什么是工業機器人
機器人的用途是根據機器人的種類來區分的,一般的雙足類人機器人如:韓國的Minirobot,日本的KONDO都是進行舞蹈表演的,中國的金剛機器人是用來踢足球和搏擊的,而且在很多賽事都拿到了不錯的成績。要是一般的迎賓機器人的話就是在酒店或者旅游景點啊做講解和迎賓用...
2025-06-16 -
 楊浦區便宜的自動化控制系統
楊浦區便宜的自動化控制系統系統監視系統監視的目的主要在于監視系統的狀態及控制的過程,從而使運行人員更便于進行控制的啟動、中斷及修正等,從而使運行人員更便于進行控制的啟動、中斷及修正等。因此,系統監視和系統控制有著密切的關系,特別是在緊急情況及恢復情況下監視和控制是統一進行的。自動化的水...
2025-06-16 -
長寧區定做自動化控制系統
工作原理輸入信號采集:通過輸入模塊實時監測外部設備的狀態,如開關、傳感器等,并將這些信號傳輸給 CPU。信號處理:對采集到的信號進行相應的處理,包括信號濾波、放大、變換、比較等,以確保信號的可靠性和正確性。執行用戶程序:CPU 根據用戶編寫的程序,對輸入信號進...
2025-06-16 -
 河南什么是驅動器
河南什么是驅動器濕度對無錫文亞機電自動化設備有限公司驅動器的信號傳輸會產生干擾。在高濕度環境下,驅動器內部的信號傳輸線路可能因水汽附著而出現信號衰減、失真等問題。尤其是一些高速、高精度的信號傳輸,如編碼器反饋信號,對濕度更為敏感。當濕度較高時,編碼器輸出的信號可能受到干擾,導...
2025-06-16 -
金山區本地驅動器
電磁兼容性測試是無錫文亞機電自動化設備有限公司確保驅動器質量和可靠性的重要環節。在驅動器研發和生產過程中,文亞機電嚴格按照相關電磁兼容性標準對產品進行測試。通過模擬各種電磁干擾環境,如輻射發射測試、傳導發射測試、靜電放電測試等,檢測驅動器在不同干擾條件下的性能...
2025-06-16 -
 附近哪里有工業機器人圖片
附近哪里有工業機器人圖片工業機器人是***用于工業領域的多關節機械手或多自由度的機器裝置,具有一定的自動性,可依靠自身的動力能源和控制能力實現各種工業加工制造功能。工業機器人被廣泛應用于電子、物流、化工等各個工業領域之中。20世紀50年代末,工業機器人**早開始投入使用。約瑟夫·恩格...
2025-06-16 -
自動化控制系統標準
過程自動化:石油煉制和化工等工業中流體或粉體的化學處理自動化。一般采用由檢測儀表、調節器和計算機等組成的過程控制系統,對加熱爐、精餾塔等設備或整個工廠進行比較好控制。采用的主要控制方式有反饋控制、前饋控制和比較好控制等。圖4.自動化設備機械制造自動化:這是機械...
2025-06-15 -
江蘇節能自動化控制系統
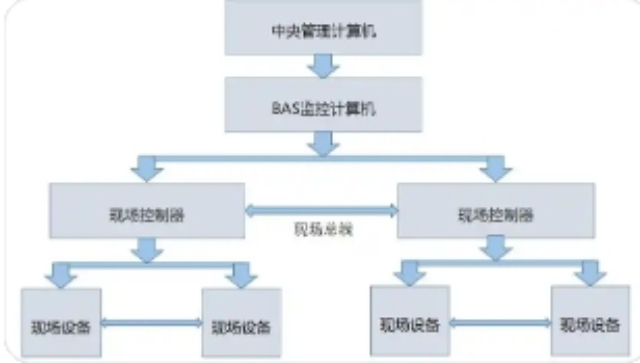
控制回路類型工業中使用的主要控制回路類型包括監控和數據采集(SCADA)系統、工業控制系統(ICS)或分布式控制系統(DCS)。SCADA是指專為遠程過程控制而設計的計算機應用程序。盡管SCADA系統在專有軟件上運行,但它們可能具有硬件組件。硬件組件收集有關給...
2025-06-15 -
 閔行區定做傳感器
閔行區定做傳感器傳感器量程的計算公式是在充分考慮到影響秤體的各個因素后,經過大量的實驗而確定的。公式如下:C=K-0K-1K-2K-3(Wmax+W)/NC—單個傳感器的額定量程W—秤體自重Wmax—被稱物體凈重的最大值N—秤體所采用支撐點的數量K-0—保險系數,一般取值在1...
2025-06-15 -
楊浦區驅動器客服電話
電壓閃變對文亞機電驅動器的影響及防范電壓閃變是指電壓幅值在短時間內快速變化的現象,這對無錫文亞機電自動化設備有限公司的驅動器有著***影響。電壓閃變通常由大型沖擊性負載的頻繁啟停引起,如電焊機、電弧爐等設備。當文亞機電驅動器遭遇電壓閃變時,其內部的電源電路可能...
2025-06-15 -
 河北私人工業機器人
河北私人工業機器人工業機器人懸臂結構極易在多軸聯動、重載及快速起停時引起抖動。機器人本體剛度要與電機伺服剛度參數相匹配,剛度過高,會造成振動,剛度過低會造成起停反應緩慢。機器人在不同的位置和姿態,以及在不同的工裝負載下剛度都不一樣,很難通過提前設置伺服剛度值能滿足所有工況的需求...
2025-06-15 -
惠山區驅動器哪家好
在工業自動化領域,無錫文亞機電自動化設備有限公司的驅動器應用***。電壓穩定性是驅動器正常啟動的關鍵要素。文亞機電驅動器在設計時,對輸入電壓范圍有明確要求。若實際運行中,電壓低于額定值,會使驅動器內部電路無法正常初始化,導致啟動困難。比如在一些老舊廠房,電力系...
2025-06-15 -
南京便宜的工業機器人
機器人(英語:Robot)包括一切模擬人類行為或思想與模擬其他生物的機械(如機器狗,機器貓,機器車等)。狹義上對機器人的定義還有很多分類法及爭議,有些電腦程序甚至也被稱為機器人。在當代工業中,機器人指能自動執行任務的人造機器裝置,用以取代或協助人類工作,一般會...
2025-06-15 -
山西進口傳感器
傳感器的特點包括:微型化、數字化、智能化、多功能化、系統化、網絡化,它不僅促進了傳統產業的改造和更新換代,而且還可能建立新型工業,從而成為21世紀新的經濟增長點。微型化是建立在微電子機械系統(MEMS)技術基礎上的,已成功應用在硅器件上做成硅壓力傳感器。玻璃封...
2025-06-15 -
 江西自動化控制系統哪家好
江西自動化控制系統哪家好隨著生產規模的日益擴大。一旦發生事故,不但在經濟上會造成巨大的損失,而且人員傷亡和對環境的影響均非同小可,因此生產的安全問題日益受重視。目前,一些化工或石化企業的安全系統,這樣企業的控制系統就由兩大部分組成,即DCS與專門的PLC。由于新型DCS的功能不斷擴大...
2025-06-15 -
浙江微型工業機器人
驅動多合一、驅控一體。驅動多合一,多核CPU多軸驅控一體化集成技術,提高系統性能,降低驅動體積與成本。 [5]④在線自適應抖振抑制工業機器人懸臂結構極易在多軸聯動、重載及快速起停時引起抖動。機器人本體剛度要與電機伺服剛度參數相匹配,剛度過高,會造成振動,剛度過...
2025-06-15 -
湖南工業機器人是什么
1954年美國戴沃爾**早提出了工業機器人的概念,并申請了專利。該**的要點是借助伺服技術控制機器人的關節,利用人手對機器人進行動作示教,機器人能實現動作的記錄和再現。這就是所謂的示教再現機器人。現有的機器人差不多都采用這種控制方式。1959年UNIMATIO...
2025-06-15 -
 梁溪區傳感器應用范圍
梁溪區傳感器應用范圍變頻功率傳感器通過對輸入的電壓、電流信號進行交流采樣,再將采樣值通過電纜、光纖等傳輸系統與數字量輸入二次儀表相連,數字量輸入二次儀表對電壓、電流的采樣值進行運算,可以獲取電壓有效值、電流有效值、基波電壓、基波電流、諧波電壓、諧波電流、有功功率、基波功率、諧波功...
2025-06-15