4路AI360全景影像系統|4路AI360全景影像集成系統|4路AI360環視高清影像系統
車侶4路AI360全景影像系統之全景拼接與BSD盲區監測功能詳解:
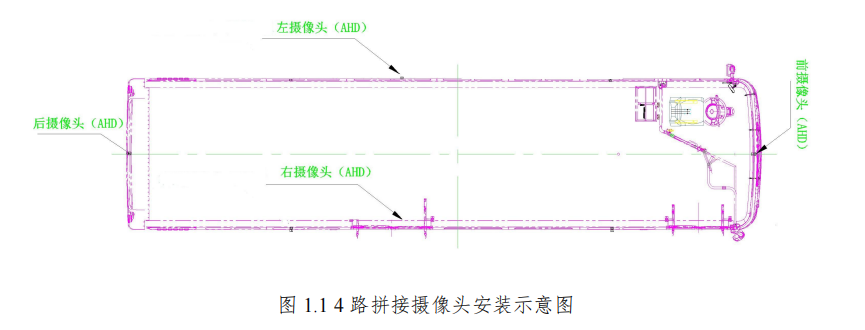
一、全景拼接功能4路AI360全景影像系統通過集成四路環視攝像頭,實現了車輛周圍環境的全方W無死角覆蓋。這四路攝像頭分別安裝在車輛的前、后、左、右四個方向,利用先進的圖像拼接算法,將四路視頻流無縫拼接成一幅完整的360度全景圖像。這一功能不僅為駕駛員提供了直觀的車輛周邊環境視圖,還極大地提升了泊車、窄道行駛等復雜場景下的駕駛安全性和便利性。
二、BSD盲區監測預警功能BSD(Blind Spot Detection)盲區監測預警系統是4路AI360全景影像系統的另一大亮點。該系統利用360全景環視攝像頭采集的實時視頻數據,結合先進的AI圖像識別技術,對車輛兩側及后方的盲區進行實時監測。當系統檢測到有行人、車輛或其他障礙物進入盲區時,會立即通過聲光電等多種方式向駕駛員發出預警,有效避免因盲區導致的碰撞事故。
三、實時目標檢測與跟蹤系統內置的AI算法能夠實現對車輛周圍人、物等目標的實時檢測、識別與跟蹤。通過深度學習模型,系統能夠準確區分不同類型的目標(如行人、自行車、其他車輛等),并持續跟蹤其運動軌跡,為駕駛員提供更為精細的環境感知信息。
四、危險預測與預警機制基于實時目標檢測與跟蹤的結果,系統能夠預測潛在的危險情況,如行人突然闖入車道、后方車輛快速接近等。一旦檢測到潛在危險,系統會立即啟動聲光電告警機制,并可根據預設邏輯輸出控速信號,自動調整車輛速度,以避免或減輕碰撞事故的影響。
五、功能融合與協同工作全景拼接與BSD盲區監測預警功能并非孤立存在,而是相互融合、協同工作的。全景拼接為BSD提供了更廣闊的視野范圍,使得盲區監測更為全M;而BSD的預警信息則能夠進一步豐富全景圖像的顯示內容,為駕駛員提供更加直觀、全M的安全提示。這種功能融合的設計思路,使得4路AI360全景影像系統在提升駕駛安全性方面發揮了更大的作用。
- 青海司機行為檢測預警系統聯系方式 2025-06-01
- 吉林船舶多路視頻拼接系統開發平臺 2025-06-01
- 甘肅司機行為識別疲勞駕駛預警系統 2025-06-01
- 湖南機車多路視頻拼接系統開發商 2025-06-01
- 工程車360環視攝像頭加裝 2025-06-01
- 西藏360全景多路視頻拼接系統定制開發 2025-06-01
- 重慶4G通信司機行為檢測預警系統 2025-06-01
- 四川防司機行為檢測預警系統 2025-06-01
- 新疆司機行為監測疲勞駕駛預警系統 2025-06-01
- 廣東AI疲勞駕駛預警系統 2025-06-01
- 滁州現代機械停車主機架廠家電話 2025-06-01
- 南通選購汽車座椅前后調節開關 2025-06-01
- 常州安裝三維掃描服務專業團隊在線服務 2025-06-01
- 南京鍛件冷鍛加工冷擠壓件 2025-06-01
- 自動化涂膠導熱膠GFC3500LV中國銷售 2025-06-01
- 深圳小型車陶瓷剎車片哪家好 2025-06-01
- 湖北永樂加熱片廠家 2025-06-01
- 四川汽車行業隔熱棉生產廠家 2025-06-01
- 青島打印機固定mopp膠帶報價 2025-06-01
- 浙江環氧板加熱片哪里買 2025-06-01