-
個(gè)人品牌修煉ABC-浙江銘生
-
方旭:一個(gè)律師的理想信念-浙江銘生
-
筆記:如何追加轉(zhuǎn)讓股權(quán)的未出資股東為被執(zhí)行人
-
生命中無法缺失的父愛(婚姻家庭)
-
律師提示:如何應(yīng)對婚前財(cái)產(chǎn)約定
-
搞垮一個(gè)事務(wù)所的辦法有很多,辦好一個(gè)事務(wù)所的方法卻只有一個(gè)
-
顛覆認(rèn)知:語文數(shù)學(xué)總共考了96分的人生會(huì)怎樣?
-
寧波律師陳春香:爆款作品創(chuàng)作者如何提醒網(wǎng)絡(luò)言論的邊界意識
-
搖號成功選房后還可以后悔要求退還意向金嗎
-
誤以為“低成本、高回報(bào)”的假離婚,多少人誤入歧途
-
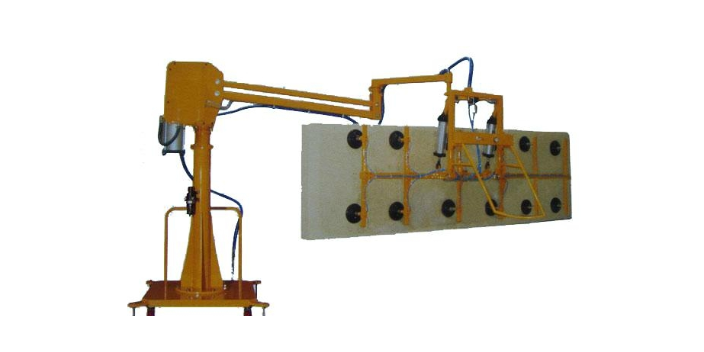
 普陀區(qū)直銷物料搬運(yùn)裝備圖片
普陀區(qū)直銷物料搬運(yùn)裝備圖片單元化單元化是將規(guī)模思想應(yīng)用到不同物料的搬運(yùn)中,其優(yōu)越性主要體現(xiàn)在:可以簡化環(huán)節(jié),節(jié)省費(fèi)用,實(shí)現(xiàn)總體優(yōu)化;便于實(shí)現(xiàn)裝卸搬運(yùn)作業(yè)機(jī)械化,減輕工人勞動(dòng)強(qiáng)度,提高工作效率;減少貨物變換環(huán)節(jié)減少因變換而造成的貨損差,提高物流質(zhì)量,節(jié)約人力物力和費(fèi)用;減少了受氣候影響的...
2025-05-01 -
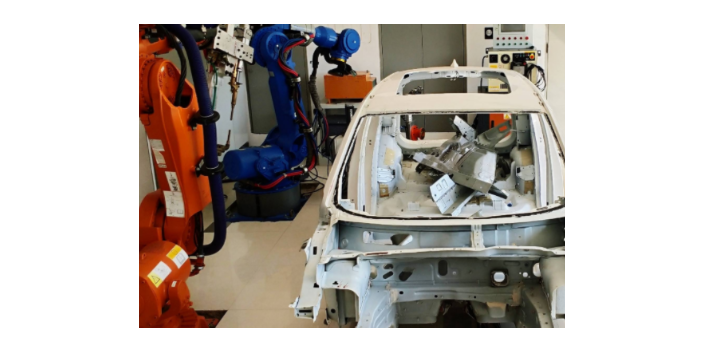
 金山區(qū)質(zhì)量工業(yè)機(jī)器人專賣店
金山區(qū)質(zhì)量工業(yè)機(jī)器人專賣店1.搬運(yùn)機(jī)器人 這種機(jī)器人用途很廣,一般只需點(diǎn)位控制。即被搬運(yùn)零件無嚴(yán)格的運(yùn)動(dòng)軌跡要求,只要求始點(diǎn)和終點(diǎn)位姿準(zhǔn)確。如機(jī)床上用的上下料器人,工件堆垛機(jī)器人,注塑機(jī)配套用的機(jī)械等。2.噴涂機(jī)器人 這種機(jī)器人多用于噴漆生產(chǎn)線上,重復(fù)位姿精度要求不高。但由于漆霧易燃,...
2025-05-01 -
 長寧區(qū)購買工業(yè)機(jī)器人維修電話
長寧區(qū)購買工業(yè)機(jī)器人維修電話工業(yè)機(jī)器人定義為“其操作機(jī)是自動(dòng)控制的,可重復(fù)編程、多用途,并可以對3個(gè)以上軸進(jìn)行編程。它可以是固定式或者移動(dòng)式。在工業(yè)自動(dòng)化應(yīng)用中使用”。操作機(jī)又定義為“是一種機(jī)器,其機(jī)構(gòu)通常由一系列相互鉸接或相對滑動(dòng)的構(gòu)件所組成。它通常有幾個(gè)自由度,用以抓取或移動(dòng)物體(工...
2025-05-01 -
靜安區(qū)附近工業(yè)機(jī)器人怎么用
控制系統(tǒng)可根據(jù)動(dòng)作的要求,設(shè)計(jì)采用數(shù)字順序控制。它首先要編制程序加以存儲,然后再根據(jù)規(guī)定的程序,控制機(jī)械手進(jìn)行工作程序的存儲方式有分離存儲和集中存儲兩種。分離存儲是將各種控制因素的信息分別存儲于兩種以上的存儲裝置中,如順序信息存儲于插銷板、凸輪轉(zhuǎn)鼓、穿孔帶內(nèi);...
2025-04-30 -
 奉賢區(qū)購買物料搬運(yùn)裝備現(xiàn)貨
奉賢區(qū)購買物料搬運(yùn)裝備現(xiàn)貨機(jī)械工廠的廠外物料搬運(yùn)與廠址選擇和專業(yè)化協(xié)作有密切關(guān)系。廠外物料搬運(yùn)通常包括公路運(yùn)輸、鐵路運(yùn)輸、水路運(yùn)輸?shù)确绞健8鞴S根據(jù)對外交通、原材料供應(yīng)、專業(yè)化協(xié)作和產(chǎn)品銷售等條件選擇運(yùn)輸方式。直達(dá)工廠的鐵路運(yùn)輸需要修建**線并自備鐵路車輛,往往投資大、占地多。采用水路...
2025-04-30 -
 奉賢區(qū)多功能物料搬運(yùn)裝備廠家現(xiàn)貨
奉賢區(qū)多功能物料搬運(yùn)裝備廠家現(xiàn)貨在機(jī)械工廠中,各加工工序、物料存放地之間相互傳遞的物料通常碼放在托盤或料箱中,可以成盤成箱地進(jìn)行單元化搬運(yùn),既能減少勞動(dòng)量和避免物料磕碰損耗,也便于計(jì)數(shù)查看。隨著機(jī)械產(chǎn)品的生產(chǎn)自動(dòng)化水平不斷提高,包括機(jī)械手和工業(yè)機(jī)器人的推廣應(yīng)用,物料的搬運(yùn)作業(yè)與加工過程關(guān)系越...
2025-04-30 -
 徐匯區(qū)智能物料搬運(yùn)裝備專賣店
徐匯區(qū)智能物料搬運(yùn)裝備專賣店“十二五”期間至2020年是我國貫徹國民經(jīng)濟(jì)可持續(xù)發(fā)展戰(zhàn)略、推動(dòng)循環(huán)經(jīng)濟(jì)發(fā)展,走新型工業(yè)化道路,奠定建設(shè)資源節(jié)約型和環(huán)境友好型社會(huì)基礎(chǔ)的重要時(shí)期。高度重視社會(huì)與企業(yè)物流作用,大力發(fā)展現(xiàn)代物流業(yè),對于推動(dòng)和提升產(chǎn)業(yè)的發(fā)展、提高經(jīng)濟(jì)運(yùn)行質(zhì)量和效益、增強(qiáng)綜合國力和企...
2025-04-30 -
普陀區(qū)附近物料搬運(yùn)裝備銷售廠
2011年中國物料搬運(yùn)設(shè)備制造行業(yè)規(guī)模(年收入2000萬元)以上企業(yè)1580家,從業(yè)人員超過40萬人;行業(yè)實(shí)現(xiàn)銷售收入4723.47億元,工業(yè)總產(chǎn)值4712.23億元,利潤總額341.50億元,年均復(fù)合增長率均超過20%。隨著生產(chǎn)規(guī)模的擴(kuò)大,自動(dòng)化程度的提高,...
2025-04-30 -
 松江區(qū)本地工業(yè)機(jī)器人排行榜
松江區(qū)本地工業(yè)機(jī)器人排行榜按驅(qū)動(dòng)方式可分為液壓式、氣動(dòng)式、電動(dòng)式、機(jī)械式。特點(diǎn)是可以通過編程來完成各種預(yù)期的作業(yè),構(gòu)造和性能上兼有人和機(jī)械手機(jī)器各自的優(yōu)點(diǎn)。機(jī)械手主要由執(zhí)行機(jī)構(gòu)、驅(qū)動(dòng)機(jī)構(gòu)和控制系統(tǒng)三大部分組成。手部是用來抓持工件(或工具)的部件,根據(jù)被抓持物件的形狀、尺寸、重量、材料和...
2025-04-30 -
奉賢區(qū)質(zhì)量物料搬運(yùn)裝備推薦廠家
物料搬運(yùn) materials handling物料搬運(yùn)指物料提起、移動(dòng)與放置,以生產(chǎn)時(shí)間與地點(diǎn)效用,即物料的儲存和短距離移動(dòng)的管理。另一說法為,物料搬運(yùn)為在適當(dāng)條件下,使用正確的方法,在適當(dāng)?shù)攸c(diǎn),適當(dāng)時(shí)間,適當(dāng)位置,適當(dāng)順序,適當(dāng)成本下,提供正確數(shù)量的正確物料...
2025-04-30 -
 靜安區(qū)附近工業(yè)機(jī)器人銷售廠
靜安區(qū)附近工業(yè)機(jī)器人銷售廠機(jī)器人是“ROBOT”一詞的中文譯名。由于影視宣傳和科幻小說的影響,人們往往把機(jī)器人想像成外貌似人的機(jī)械和電子裝置。但事實(shí)并不是這樣,特別是工業(yè)機(jī)器人,與人外貌往往毫無相似之處。編程就是讓計(jì)算機(jī)為解決某個(gè)問題而使用某種程序設(shè)計(jì)語言編寫程序代碼,并**終得到結(jié)果...
2025-04-29 -
閔行區(qū)智能工業(yè)機(jī)器人拆裝
機(jī)械手是一種能模仿人手和臂的某些動(dòng)作功能,用以按固定程序抓取、搬運(yùn)物件或操作工具的自動(dòng)操作裝置。特點(diǎn)是可以通過編程來完成各種預(yù)期的作業(yè),構(gòu)造和性能上兼有人和機(jī)械手機(jī)器各自的優(yōu)點(diǎn)。機(jī)械手是**早出現(xiàn)的工業(yè)機(jī)器人,也是**早出現(xiàn)的現(xiàn)代機(jī)器人,它可代替人的繁重勞動(dòng)以...
2025-04-29 -
奉賢區(qū)附近哪里有工業(yè)機(jī)器人現(xiàn)貨
1.搬運(yùn)機(jī)器人 這種機(jī)器人用途很廣,一般只需點(diǎn)位控制。即被搬運(yùn)零件無嚴(yán)格的運(yùn)動(dòng)軌跡要求,只要求始點(diǎn)和終點(diǎn)位姿準(zhǔn)確。如機(jī)床上用的上下料器人,工件堆垛機(jī)器人,注塑機(jī)配套用的機(jī)械等。2.噴涂機(jī)器人 這種機(jī)器人多用于噴漆生產(chǎn)線上,重復(fù)位姿精度要求不高。但由于漆霧易燃,...
2025-04-29 -
嘉定區(qū)多功能工業(yè)機(jī)器人維保
機(jī)器人是“ROBOT”一詞的中文譯名。由于影視宣傳和科幻小說的影響,人們往往把機(jī)器人想像成外貌似人的機(jī)械和電子裝置。但事實(shí)并不是這樣,特別是工業(yè)機(jī)器人,與人外貌往往毫無相似之處。編程就是讓計(jì)算機(jī)為解決某個(gè)問題而使用某種程序設(shè)計(jì)語言編寫程序代碼,并**終得到結(jié)果...
2025-04-29 -
上海本地工業(yè)機(jī)器人量大從優(yōu)
機(jī)械手是一種能模仿人手和臂的某些動(dòng)作功能,用以按固定程序抓取、搬運(yùn)物件或操作工具的自動(dòng)操作裝置。特點(diǎn)是可以通過編程來完成各種預(yù)期的作業(yè),構(gòu)造和性能上兼有人和機(jī)械手機(jī)器各自的優(yōu)點(diǎn)。機(jī)械手是**早出現(xiàn)的工業(yè)機(jī)器人,也是**早出現(xiàn)的現(xiàn)代機(jī)器人,它可代替人的繁重勞動(dòng)以...
2025-04-29 -
松江區(qū)購買工業(yè)機(jī)器人專賣店
控制系統(tǒng)可根據(jù)動(dòng)作的要求,設(shè)計(jì)采用數(shù)字順序控制。它首先要編制程序加以存儲,然后再根據(jù)規(guī)定的程序,控制機(jī)械手進(jìn)行工作程序的存儲方式有分離存儲和集中存儲兩種。分離存儲是將各種控制因素的信息分別存儲于兩種以上的存儲裝置中,如順序信息存儲于插銷板、凸輪轉(zhuǎn)鼓、穿孔帶內(nèi);...
2025-04-29 -
嘉定區(qū)安裝工業(yè)機(jī)器人操作
工業(yè)機(jī)器人定義為“其操作機(jī)是自動(dòng)控制的,可重復(fù)編程、多用途,并可以對3個(gè)以上軸進(jìn)行編程。它可以是固定式或者移動(dòng)式。在工業(yè)自動(dòng)化應(yīng)用中使用”。操作機(jī)又定義為“是一種機(jī)器,其機(jī)構(gòu)通常由一系列相互鉸接或相對滑動(dòng)的構(gòu)件所組成。它通常有幾個(gè)自由度,用以抓取或移動(dòng)物體(工...
2025-04-29 -
崇明區(qū)定做工業(yè)機(jī)器人圖片
2.氣動(dòng)式 其驅(qū)動(dòng)系統(tǒng)通常由氣缸、氣閥、氣罐和空壓機(jī)組成,其特點(diǎn)是氣源方便,動(dòng)作迅速、結(jié)構(gòu)簡單、造價(jià)較低、維修方便。但難以進(jìn)行速度控制,氣壓不可太高,故抓舉能力較低。3.電動(dòng)式 電力驅(qū)動(dòng)是目前機(jī)器人使用得**多的一種驅(qū)動(dòng)方式。其特點(diǎn)是電源方便,響應(yīng)快,驅(qū)動(dòng)力較...
2025-04-29 -
 上海附近物料搬運(yùn)裝備市場
上海附近物料搬運(yùn)裝備市場物料搬運(yùn)機(jī)械主要是在企業(yè)(包括碼頭、料場、礦山和商業(yè)貨倉等)內(nèi)部進(jìn)行物料裝卸、運(yùn)輸、升降、堆垛和儲存的機(jī)械設(shè)備。一般包括起重機(jī)械、輸送機(jī)、裝卸機(jī)械、搬運(yùn)車輛和倉儲設(shè)備等;習(xí)慣上不包括汽車、鐵路車輛、飛機(jī)和船舶等交通運(yùn)輸工具,以及輸送氣體和液體的管道。物料搬運(yùn)機(jī)...
2025-04-29 -
嘉定區(qū)安裝物料搬運(yùn)裝備廠家現(xiàn)貨
“十二五”期間至2020年是我國貫徹國民經(jīng)濟(jì)可持續(xù)發(fā)展戰(zhàn)略、推動(dòng)循環(huán)經(jīng)濟(jì)發(fā)展,走新型工業(yè)化道路,奠定建設(shè)資源節(jié)約型和環(huán)境友好型社會(huì)基礎(chǔ)的重要時(shí)期。高度重視社會(huì)與企業(yè)物流作用,大力發(fā)展現(xiàn)代物流業(yè),對于推動(dòng)和提升產(chǎn)業(yè)的發(fā)展、提高經(jīng)濟(jì)運(yùn)行質(zhì)量和效益、增強(qiáng)綜合國力和企...
2025-04-29 -
金山區(qū)直銷工業(yè)機(jī)器人量大從優(yōu)
1.搬運(yùn)機(jī)器人 這種機(jī)器人用途很廣,一般只需點(diǎn)位控制。即被搬運(yùn)零件無嚴(yán)格的運(yùn)動(dòng)軌跡要求,只要求始點(diǎn)和終點(diǎn)位姿準(zhǔn)確。如機(jī)床上用的上下料器人,工件堆垛機(jī)器人,注塑機(jī)配套用的機(jī)械等。2.噴涂機(jī)器人 這種機(jī)器人多用于噴漆生產(chǎn)線上,重復(fù)位姿精度要求不高。但由于漆霧易燃,...
2025-04-29 -
 楊浦區(qū)安裝工業(yè)機(jī)器人量大從優(yōu)
楊浦區(qū)安裝工業(yè)機(jī)器人量大從優(yōu)工業(yè)機(jī)器人定義為“其操作機(jī)是自動(dòng)控制的,可重復(fù)編程、多用途,并可以對3個(gè)以上軸進(jìn)行編程。它可以是固定式或者移動(dòng)式。在工業(yè)自動(dòng)化應(yīng)用中使用”。操作機(jī)又定義為“是一種機(jī)器,其機(jī)構(gòu)通常由一系列相互鉸接或相對滑動(dòng)的構(gòu)件所組成。它通常有幾個(gè)自由度,用以抓取或移動(dòng)物體(工...
2025-04-29 -
虹口區(qū)定做工業(yè)機(jī)器人聯(lián)系人
3、電氣驅(qū)動(dòng)式電力驅(qū)動(dòng)是機(jī)械手使用得**多的一種驅(qū)動(dòng)方式。其特點(diǎn)是電源方便,響應(yīng)快,驅(qū)動(dòng)力較大(關(guān)節(jié)型的持重已達(dá)400kg),信號檢測、傳動(dòng)、處理方便,并可采用多種靈活的控制方案。驅(qū)動(dòng)電機(jī)一般采用步進(jìn)電機(jī),直流伺服電機(jī)(AC)為主要的驅(qū)動(dòng)方式。由于電機(jī)速度高,...
2025-04-29 -
徐匯區(qū)特定物料搬運(yùn)裝備廠家現(xiàn)貨
物料搬運(yùn) materials handling物料搬運(yùn)指物料提起、移動(dòng)與放置,以生產(chǎn)時(shí)間與地點(diǎn)效用,即物料的儲存和短距離移動(dòng)的管理。另一說法為,物料搬運(yùn)為在適當(dāng)條件下,使用正確的方法,在適當(dāng)?shù)攸c(diǎn),適當(dāng)時(shí)間,適當(dāng)位置,適當(dāng)順序,適當(dāng)成本下,提供正確數(shù)量的正確物料...
2025-04-29 -
上海質(zhì)量物料搬運(yùn)裝備排行榜
物料搬運(yùn) materials handling物料搬運(yùn)指物料提起、移動(dòng)與放置,以生產(chǎn)時(shí)間與地點(diǎn)效用,即物料的儲存和短距離移動(dòng)的管理。另一說法為,物料搬運(yùn)為在適當(dāng)條件下,使用正確的方法,在適當(dāng)?shù)攸c(diǎn),適當(dāng)時(shí)間,適當(dāng)位置,適當(dāng)順序,適當(dāng)成本下,提供正確數(shù)量的正確物料...
2025-04-29 -
虹口區(qū)安裝物料搬運(yùn)裝備選擇
機(jī)械工廠的廠內(nèi)物流系統(tǒng)涉及全廠的生產(chǎn)計(jì)劃、工藝流程、搬運(yùn)作業(yè)、倉庫管理、信息系統(tǒng)等各個(gè)方面。它要求合理安排物料搬運(yùn)的路線、運(yùn)量、搬運(yùn)方法和設(shè)備、儲存場地、作業(yè)人員等,以便加快物流速度(中間停頓少、生產(chǎn)周期短),提高物流質(zhì)量(物料損耗少、搬運(yùn)效率高、安全作業(yè)好)...
2025-04-29 -
上海銷售物料搬運(yùn)裝備現(xiàn)貨
物料搬運(yùn) materials handling物料搬運(yùn)指物料提起、移動(dòng)與放置,以生產(chǎn)時(shí)間與地點(diǎn)效用,即物料的儲存和短距離移動(dòng)的管理。另一說法為,物料搬運(yùn)為在適當(dāng)條件下,使用正確的方法,在適當(dāng)?shù)攸c(diǎn),適當(dāng)時(shí)間,適當(dāng)位置,適當(dāng)順序,適當(dāng)成本下,提供正確數(shù)量的正確物料...
2025-04-29 -
奉賢區(qū)什么是工業(yè)機(jī)器人聯(lián)系人
4.裝配機(jī)械人 這種機(jī)器人要有較高的位姿精度,手腕具有較大的柔性。目前大多用于機(jī)電產(chǎn)品的裝配作業(yè)。5.專門用途的機(jī)器人 如醫(yī)用護(hù)理機(jī)器人、航天用機(jī)器人、探海用機(jī)器人以及排險(xiǎn)作業(yè)機(jī)器人等。按操作機(jī)的位置機(jī)構(gòu)形式和自由度數(shù)量分類機(jī)器人操作機(jī)的位置機(jī)構(gòu)型式是機(jī)器人重...
2025-04-28 -
松江區(qū)多功能工業(yè)機(jī)器人維修電話
例如:尋找,運(yùn)輸,握取,對準(zhǔn),裝配,檢驗(yàn)等動(dòng)作. 為了明確地描述工業(yè)機(jī)械人,美國機(jī)械人協(xié)會(huì)在1979年將機(jī)械人定義為一個(gè)可用程式控制,多功能的操作器,它透過程式控制和多變化的動(dòng)作設(shè)計(jì)來移動(dòng)材料,工件,工具或特別設(shè)備,以完成一連串的工作.所以,雖然許多工業(yè)機(jī)械人...
2025-04-28 -
松江區(qū)本地物料搬運(yùn)裝備排行榜
“十二五”期間至2020年是我國貫徹國民經(jīng)濟(jì)可持續(xù)發(fā)展戰(zhàn)略、推動(dòng)循環(huán)經(jīng)濟(jì)發(fā)展,走新型工業(yè)化道路,奠定建設(shè)資源節(jié)約型和環(huán)境友好型社會(huì)基礎(chǔ)的重要時(shí)期。高度重視社會(huì)與企業(yè)物流作用,大力發(fā)展現(xiàn)代物流業(yè),對于推動(dòng)和提升產(chǎn)業(yè)的發(fā)展、提高經(jīng)濟(jì)運(yùn)行質(zhì)量和效益、增強(qiáng)綜合國力和企...
2025-04-28