-
 天津驅(qū)動(dòng)器怎么用
天津驅(qū)動(dòng)器怎么用溫度驟變同樣會(huì)對(duì)無錫文亞機(jī)電自動(dòng)化設(shè)備有限公司的驅(qū)動(dòng)器產(chǎn)生不利影響。在一些特殊工業(yè)場(chǎng)景,如冷庫與高溫加工車間交替作業(yè)的場(chǎng)所,驅(qū)動(dòng)器可能短時(shí)間內(nèi)經(jīng)歷較大的溫度變化。溫度驟變會(huì)使驅(qū)動(dòng)器內(nèi)部不同材料的部件因熱脹冷縮程度不同,產(chǎn)生應(yīng)力集中。例如,電路板與外殼之間的連接...
2025-06-02 -
 鎮(zhèn)江附近哪里有自動(dòng)化控制系統(tǒng)
鎮(zhèn)江附近哪里有自動(dòng)化控制系統(tǒng)系統(tǒng)監(jiān)視系統(tǒng)監(jiān)視的目的主要在于監(jiān)視系統(tǒng)的狀態(tài)及控制的過程,從而使運(yùn)行人員更便于進(jìn)行控制的啟動(dòng)、中斷及修正等,從而使運(yùn)行人員更便于進(jìn)行控制的啟動(dòng)、中斷及修正等。因此,系統(tǒng)監(jiān)視和系統(tǒng)控制有著密切的關(guān)系,特別是在緊急情況及恢復(fù)情況下監(jiān)視和控制是統(tǒng)一進(jìn)行的。自動(dòng)化的水...
2025-06-02 -
無錫小型自動(dòng)化控制系統(tǒng)
發(fā)展趨勢(shì)網(wǎng)絡(luò)化:隨著工業(yè)互聯(lián)網(wǎng)的發(fā)展,PLC 控制系統(tǒng)將更加注重與其他設(shè)備的數(shù)據(jù)交換和遠(yuǎn)程控制能力,實(shí)現(xiàn)設(shè)備的遠(yuǎn)程管理和維護(hù)。開放性:為了滿足不同用戶的需求,PLC 控制系統(tǒng)將朝著更加開放、兼容的方向發(fā)展,便于與其他系統(tǒng)集成。精細(xì)化:針對(duì)特定行業(yè)和場(chǎng)景,PLC...
2025-06-01 -
 虹口區(qū)工業(yè)機(jī)器人機(jī)械結(jié)構(gòu)
虹口區(qū)工業(yè)機(jī)器人機(jī)械結(jié)構(gòu)到了20世紀(jì)90年代,隨著計(jì)算機(jī)技術(shù)、智能技術(shù)的進(jìn)步和發(fā)展,第二代具有一定感覺功能的機(jī)器人已經(jīng)實(shí)用化并開始推廣,具有視覺、觸覺、高靈巧手指、能行走的第三代智能機(jī)器人相繼出現(xiàn)并開始走向應(yīng)用。 [6]2020年,中國機(jī)器人產(chǎn)業(yè)營業(yè)收入***突破1000億元。“十三...
2025-06-01 -
寶山區(qū)微型自動(dòng)化控制系統(tǒng)
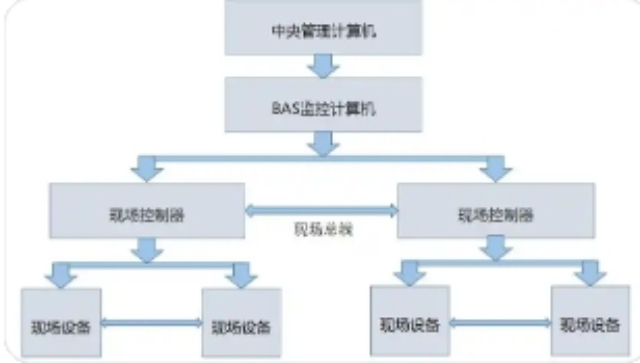
錯(cuò)誤報(bào)警模塊。對(duì)于從狀態(tài)監(jiān)視模塊輸入的錯(cuò)誤報(bào)警采用多媒體方式(視頻、語音)進(jìn)行報(bào)警、及時(shí)通知組態(tài)控制模塊,確保安全,并分析故障點(diǎn),以供參考;⑥參數(shù)設(shè)置模塊包含權(quán)限認(rèn)證,只允許有權(quán)限的操作人員對(duì)系統(tǒng)工作參數(shù)進(jìn)行調(diào)整或修改,并通過口令系統(tǒng)和設(shè)置操作權(quán)限防止非相關(guān)人...
2025-06-01 -
購買工業(yè)機(jī)器人客服電話
在工業(yè)生產(chǎn)中,零件的裝配是一件工程量極大的工作,需要大量的勞動(dòng)力,曾經(jīng)的人力裝配因?yàn)槌鲥e(cuò)率高,效率低而逐漸被工業(yè)機(jī)器人代替。裝配機(jī)器人的研發(fā),結(jié)合了多種技術(shù),包括通訊技術(shù)、自動(dòng)控制、光學(xué)原理、微電子技術(shù)等。研發(fā)人員根據(jù)裝配流程,編寫合適的程序,應(yīng)用于具體的裝配...
2025-06-01 -
 江陰本地自動(dòng)化控制系統(tǒng)
江陰本地自動(dòng)化控制系統(tǒng)自動(dòng)化控制包括半自動(dòng)與全自動(dòng)化,是現(xiàn)代農(nóng)業(yè)、工業(yè)和制造業(yè)等生產(chǎn)領(lǐng)域中,機(jī)械電氣一體自動(dòng)化的集成控制技術(shù)。自動(dòng)化運(yùn)用機(jī)械輔助工作,幫助人類擺脫了部分危險(xiǎn)、繁重的工作,輕松了人類的勞作,提高了生產(chǎn)效率。自動(dòng)化控制是工業(yè)、農(nóng)業(yè)、**和科技現(xiàn)代化的重要標(biāo)志,學(xué)習(xí)自動(dòng)化...
2025-06-01 -
 長寧區(qū)自動(dòng)化控制系統(tǒng)標(biāo)準(zhǔn)
長寧區(qū)自動(dòng)化控制系統(tǒng)標(biāo)準(zhǔn)中國擁有世界比較大的工業(yè)自動(dòng)控制系統(tǒng)裝置市場(chǎng),傳統(tǒng)工業(yè)技術(shù)改造、工廠自動(dòng)化、企業(yè)信息化需要大量的工業(yè)自動(dòng)化系統(tǒng),市場(chǎng)前景廣闊。工業(yè)控制自動(dòng)化技術(shù)正在向智能化、網(wǎng)絡(luò)化和集成化方向發(fā)展。基于工業(yè)自動(dòng)化控制較好的發(fā)展前景,預(yù)計(jì)2015年工業(yè)自動(dòng)控制系統(tǒng)裝置制造行業(yè)市...
2025-06-01 -
 上海驅(qū)動(dòng)器型號(hào)
上海驅(qū)動(dòng)器型號(hào)長期處于電磁干擾環(huán)境中,會(huì)對(duì)無錫文亞機(jī)電自動(dòng)化設(shè)備有限公司的驅(qū)動(dòng)器壽命產(chǎn)生負(fù)面影響。電磁干擾可能導(dǎo)致驅(qū)動(dòng)器內(nèi)部電子元件的溫度升高、電氣性能下降以及機(jī)械部件的磨損加劇。例如,高頻電磁干擾會(huì)使驅(qū)動(dòng)器內(nèi)部的芯片產(chǎn)生額外的功耗,導(dǎo)致芯片溫度上升,加速芯片的老化過程。同...
2025-05-31 -
 長寧區(qū)傳感器標(biāo)準(zhǔn)
長寧區(qū)傳感器標(biāo)準(zhǔn)壓力壓力傳感器引是工業(yè)實(shí)踐中**為常用的一種傳感器,其廣泛應(yīng)用于各種工業(yè)自控環(huán)境,涉及水利水電、鐵路交通、智能建筑、生產(chǎn)自控、航空航天、**、石化、油井、電力、船舶、機(jī)床、管道等眾多行業(yè)。超聲波測(cè)距離超聲波測(cè)距離傳感器采用超聲波回波測(cè)距原理,運(yùn)用精確的時(shí)差測(cè)量...
2025-05-31 -
購買驅(qū)動(dòng)器客服電話
變轉(zhuǎn)矩負(fù)載在工業(yè)領(lǐng)域也較為常見,像風(fēng)機(jī)、泵類設(shè)備就屬于此類。無錫文亞機(jī)電自動(dòng)化設(shè)備有限公司的驅(qū)動(dòng)器在適配變轉(zhuǎn)矩負(fù)載時(shí),有著獨(dú)特的控制方式。風(fēng)機(jī)在啟動(dòng)時(shí),負(fù)載轉(zhuǎn)矩較小,但隨著轉(zhuǎn)速升高,轉(zhuǎn)矩迅速增大。文亞機(jī)電驅(qū)動(dòng)器能夠根據(jù)風(fēng)機(jī)的這一特性,在啟動(dòng)階段采用軟啟動(dòng)方式,...
2025-05-31 -
 廣東哪里有傳感器
廣東哪里有傳感器遲滯:傳感器在輸入量由小到大(正行程)及輸入量由大到小(反行程)變化期間其輸入輸出特性曲線不重合的現(xiàn)象成為遲滯。對(duì)于同一大小的輸入信號(hào),傳感器的正反行程輸出信號(hào)大小不相等,這個(gè)差值稱為遲滯差值。4.重復(fù)性:重復(fù)性是指?jìng)鞲衅髟谳斎肓堪赐环较蜃魅砍踢B續(xù)多次變化...
2025-05-31 -
安徽傳感器機(jī)械結(jié)構(gòu)
霍爾傳感器分為線性型霍爾傳感器和開關(guān)型霍爾傳感器兩種。1、線性型霍爾傳感器由霍爾元件、線性放大器和射極跟隨器組成,它輸出模擬量。2、開關(guān)型霍爾傳感器由穩(wěn)壓器、霍爾元件、差分放大器,斯密特觸發(fā)器和輸出級(jí)組成,它輸出數(shù)字量。霍爾電壓隨磁場(chǎng)強(qiáng)度的變化而變化,磁場(chǎng)越強(qiáng)...
2025-05-31 -
湖北驅(qū)動(dòng)器有幾種
無錫文亞機(jī)電自動(dòng)化設(shè)備有限公司的驅(qū)動(dòng)器采用了多種先進(jìn)的信號(hào)干擾抑制技術(shù),以應(yīng)對(duì)復(fù)雜的工業(yè)環(huán)境。在信號(hào)傳輸方面,采用差分信號(hào)傳輸技術(shù),通過兩根信號(hào)線傳輸幅度相等、相位相反的信號(hào),能夠有效抑制共模干擾。在電路設(shè)計(jì)上,使用去耦電容、電感等元件組成濾波電路,對(duì)電源和信...
2025-05-31 -
遼寧便宜的自動(dòng)化控制系統(tǒng)
20世紀(jì)40~50年代是局部自動(dòng)化時(shí)期第二次世界大戰(zhàn)時(shí)期形成的經(jīng)典控制理論對(duì)戰(zhàn)后發(fā)展局部自動(dòng)化起了重要的促進(jìn)作用。在問題的過程中形成了經(jīng)典控制理論﹐設(shè)計(jì)出各種精密的自動(dòng)調(diào)節(jié)裝置﹐開創(chuàng)了系統(tǒng)和控制這一新的科學(xué)領(lǐng)域。這一新的學(xué)科當(dāng)時(shí)在美國稱為伺服機(jī)構(gòu)理論﹐在蘇聯(lián)稱...
2025-05-31 -
 湖北驅(qū)動(dòng)器型號(hào)
湖北驅(qū)動(dòng)器型號(hào)濕度對(duì)無錫文亞機(jī)電自動(dòng)化設(shè)備有限公司驅(qū)動(dòng)器的信號(hào)傳輸會(huì)產(chǎn)生干擾。在高濕度環(huán)境下,驅(qū)動(dòng)器內(nèi)部的信號(hào)傳輸線路可能因水汽附著而出現(xiàn)信號(hào)衰減、失真等問題。尤其是一些高速、高精度的信號(hào)傳輸,如編碼器反饋信號(hào),對(duì)濕度更為敏感。當(dāng)濕度較高時(shí),編碼器輸出的信號(hào)可能受到干擾,導(dǎo)...
2025-05-31 -
寧夏哪些自動(dòng)化控制系統(tǒng)
從工業(yè)自動(dòng)化儀表的發(fā)展趨勢(shì)看,智能化是其**部分,所謂智能化表現(xiàn)在其具有多種新功能。例如過去當(dāng)流量?jī)x表需要進(jìn)行溫度,壓力的補(bǔ)償時(shí)需要分別測(cè)量流量,溫度和壓力的三臺(tái)變送器,并且需要運(yùn)算器來計(jì)算,而現(xiàn)在一臺(tái)智能化的流量變送器就可以包攬這一任務(wù);又如一臺(tái)智能化執(zhí)行器...
2025-05-31 -
寧夏便宜的傳感器
在基礎(chǔ)學(xué)科研究中,傳感器更具有突出的地位。現(xiàn)代科學(xué)技術(shù)的發(fā)展,進(jìn)入了許多新領(lǐng)域:例如在宏觀上要觀察上千光年的茫茫宇宙,微觀上要觀察小到fm的粒子世界,縱向上要觀察長達(dá)數(shù)十萬年的天體演化,短到 s的瞬間反應(yīng)。此外,還出現(xiàn)了對(duì)深化物質(zhì)認(rèn)識(shí)、開拓新能源、新材料等具有...
2025-05-31 -
 黑龍江驅(qū)動(dòng)器常見問題
黑龍江驅(qū)動(dòng)器常見問題高溫環(huán)境會(huì)***加速無錫文亞機(jī)電自動(dòng)化設(shè)備有限公司驅(qū)動(dòng)器的老化進(jìn)程。驅(qū)動(dòng)器內(nèi)部的電子元件在高溫下,化學(xué)反應(yīng)速率加快,材料性能逐漸劣化。例如,功率模塊中的 IGBT 芯片在高溫長時(shí)間作用下,其內(nèi)部的鍵合線可能出現(xiàn)斷裂,導(dǎo)致芯片失效。電路板上的焊點(diǎn)也會(huì)因熱脹冷縮頻...
2025-05-31 -
 湖北便宜的工業(yè)機(jī)器人
湖北便宜的工業(yè)機(jī)器人在我國,工業(yè)機(jī)器人廣泛應(yīng)用于制造業(yè),不僅*應(yīng)用于汽車制造業(yè),大到航天飛機(jī)的生產(chǎn),***裝備,高鐵的開發(fā),小到圓珠筆的生產(chǎn)都有廣泛的應(yīng)用。并且已經(jīng)從較為成熟的行業(yè)延伸到食品,醫(yī)療等領(lǐng)域。由于機(jī)器人技術(shù)發(fā)展迅速,與傳統(tǒng)工業(yè)設(shè)備相比,不僅產(chǎn)品的價(jià)格差距越來越小,而且...
2025-05-31 -
惠山區(qū)驅(qū)動(dòng)器產(chǎn)品介紹
電源紋波是影響無錫文亞機(jī)電自動(dòng)化設(shè)備有限公司驅(qū)動(dòng)器運(yùn)行的重要因素之一,其中發(fā)熱異常問題尤為突出。文亞機(jī)電驅(qū)動(dòng)器在正常工作時(shí),內(nèi)部電路會(huì)有一定功耗產(chǎn)生熱量,而電源紋波的存在會(huì)加劇這一情況。由于紋波會(huì)導(dǎo)致驅(qū)動(dòng)器內(nèi)部電流出現(xiàn)波動(dòng),額外的電流波動(dòng)使得電路元件工作狀態(tài)不...
2025-05-31 -
虹口區(qū)自動(dòng)化自動(dòng)化控制系統(tǒng)
自動(dòng)化的概念是一個(gè)動(dòng)態(tài)發(fā)展過程。過去,人們對(duì)自動(dòng)化的理解或者說自動(dòng)化的功能目標(biāo)是以機(jī)械的動(dòng)作代替人力操作,自動(dòng)地完成特定的作業(yè)。這實(shí)質(zhì)上是自動(dòng)化代替人的體力勞動(dòng)的觀點(diǎn)。后來隨著電子和信息技術(shù)的發(fā)展,特別是隨著計(jì)算機(jī)的出現(xiàn)和廣泛應(yīng)用,自動(dòng)化的概念已擴(kuò)展為用機(jī)器(...
2025-05-31 -
 安徽整套自動(dòng)化控制系統(tǒng)
安徽整套自動(dòng)化控制系統(tǒng)系統(tǒng)監(jiān)視系統(tǒng)監(jiān)視的目的主要在于監(jiān)視系統(tǒng)的狀態(tài)及控制的過程,從而使運(yùn)行人員更便于進(jìn)行控制的啟動(dòng)、中斷及修正等,從而使運(yùn)行人員更便于進(jìn)行控制的啟動(dòng)、中斷及修正等。因此,系統(tǒng)監(jiān)視和系統(tǒng)控制有著密切的關(guān)系,特別是在緊急情況及恢復(fù)情況下監(jiān)視和控制是統(tǒng)一進(jìn)行的。自動(dòng)化的水...
2025-05-30 -
 鹽城自動(dòng)化控制系統(tǒng)應(yīng)用范圍
鹽城自動(dòng)化控制系統(tǒng)應(yīng)用范圍隨著人力成本的日漸提高,越來越多的企業(yè)需要降低生產(chǎn)成本,提高企業(yè)競(jìng)爭(zhēng)力,迫于這樣的需求,生產(chǎn)自動(dòng)化系統(tǒng)得到了更多的應(yīng)用和推廣。自動(dòng)化控制系統(tǒng)工程(Automation and control systems),機(jī)電技術(shù)服務(wù),PLC程序(程式)設(shè)計(jì),更改,伺服控...
2025-05-30 -
 湖北哪些工業(yè)機(jī)器人
湖北哪些工業(yè)機(jī)器人其實(shí),對(duì)“機(jī)械人”的理解應(yīng)當(dāng)是人類總體工作的一部分,它也是人類的助手,幫助人類完成所不能完成的某一項(xiàng)工作。比如外太空的探秘、核輻射地帶、人類不可涉及的危險(xiǎn)操作和重污染地區(qū)等等,然而這些都離不開“機(jī)械人”或“機(jī)械生物”的幫助。這里所說的“機(jī)械生物”一詞,也是...
2025-05-30 -
黑龍江自動(dòng)化控制系統(tǒng)怎么用
組成部分中央處理單元(CPU):作為系統(tǒng)的**,負(fù)責(zé)執(zhí)行用戶程序,處理輸入信號(hào),控制輸出信號(hào),以及進(jìn)行系統(tǒng)診斷等功能。電源模塊:為 PLC 控制系統(tǒng)提供穩(wěn)定的電源,確保系統(tǒng)正常運(yùn)行,可將外部電源轉(zhuǎn)換為供 PLC 內(nèi)部使用的電源。輸入 / 輸出模塊(I/O 模塊...
2025-05-30 -
驅(qū)動(dòng)器有幾種
電機(jī)慣量是電機(jī)的一個(gè)重要參數(shù),其與無錫文亞機(jī)電自動(dòng)化設(shè)備有限公司驅(qū)動(dòng)器的匹配情況至關(guān)重要。若電機(jī)慣量與驅(qū)動(dòng)器匹配不當(dāng),會(huì)給驅(qū)動(dòng)系統(tǒng)帶來諸多問題。當(dāng)電機(jī)慣量過大,而驅(qū)動(dòng)器的能力不足以快速響應(yīng)電機(jī)的加減速需求時(shí),就像一輛重型卡車配備了一個(gè)小功率發(fā)動(dòng)機(jī),啟動(dòng)和剎車都...
2025-05-30 -
浦東新區(qū)本地傳感器
排氣溫度傳感器:排氣溫度傳感器用于測(cè)量壓縮機(jī)頂部的排氣溫度,常數(shù)B值為3950K±3%,基準(zhǔn)電阻為90℃對(duì)應(yīng)電阻5KΩ±3%。3、模塊溫度傳感器:模塊溫度傳感器用于測(cè)量變頻模塊(IGBT或IPM)的溫度,用的感溫頭的型號(hào)是602F-3500F,基準(zhǔn)電阻為25℃...
2025-05-30 -
鹽城小型自動(dòng)化控制系統(tǒng)
隨著科技的進(jìn)步,科學(xué)儀器的結(jié)構(gòu)。日益簡(jiǎn)化,體積縮小,重量減輕,操作也更方便,價(jià)格也逐步降低,而且能在工業(yè)條件下操作,因此在過去只能在實(shí)驗(yàn)室內(nèi)進(jìn)行離線操作的科學(xué)儀器,現(xiàn)在可以在生產(chǎn)現(xiàn)場(chǎng)進(jìn)行在線運(yùn)行了。例如質(zhì)譜儀居武鋼的高爐上試用,用來分析爐頂煤氣的成分。從應(yīng)用的...
2025-05-30 -
楊浦區(qū)本地自動(dòng)化控制系統(tǒng)
中國的工業(yè)自動(dòng)化市場(chǎng)主體主要由軟硬件制造商、系統(tǒng)集成商、產(chǎn)品分銷商等組成。在軟硬件產(chǎn)品領(lǐng)域,中**市場(chǎng)幾乎全部由國外***品牌產(chǎn)品壟斷,并將仍維持此種局面;在系統(tǒng)集成領(lǐng)域,跨國公司占據(jù)制造業(yè)的**,具有深厚行業(yè)背景的公司在相關(guān)行業(yè)系統(tǒng)集成業(yè)務(wù)中占據(jù)主動(dòng),具有豐...
2025-05-30